 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussian Process Gradient Maps for Loop-Closure Detection in Unstructured Planetary Environments
Paper and Code
Sep 01, 2020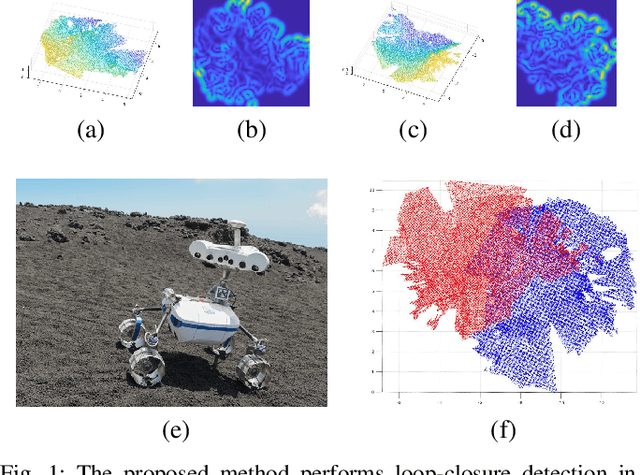
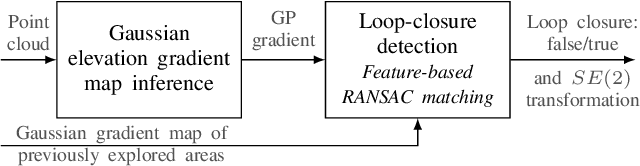
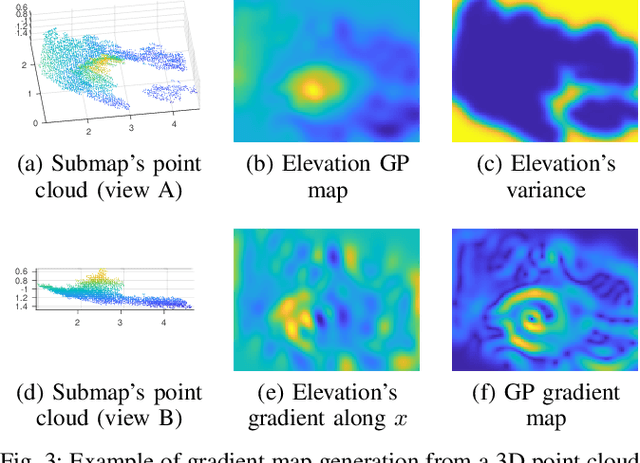
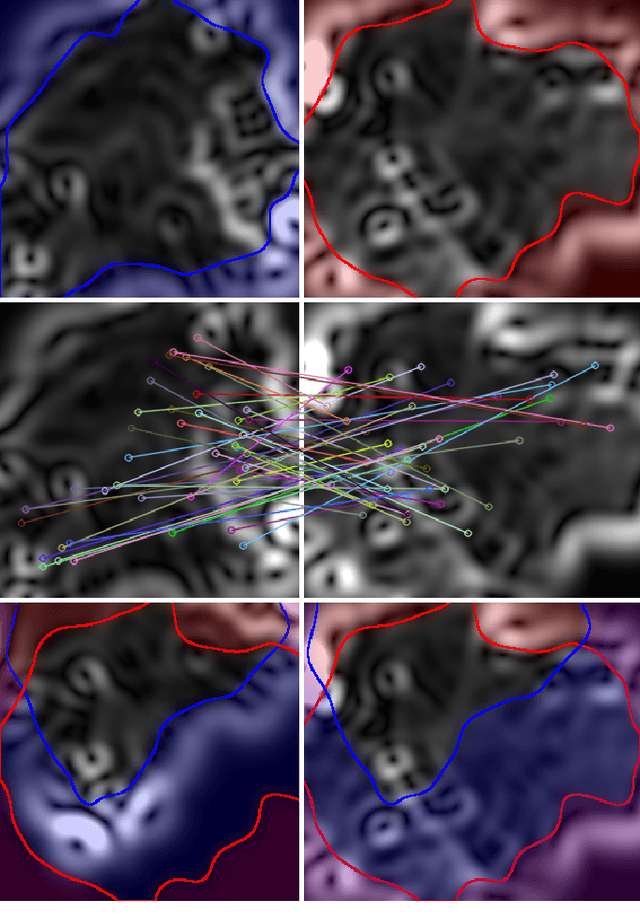
The ability to recognize previously mapped locations is an essential feature for autonomous systems. Unstructured planetary-like environments pose a major challenge to these systems due to the similarity of the terrain. As a result, the ambiguity of the visual appearance makes state-of-the-art visual place recognition approaches less effective than in urban or man-made environments. This paper presents a method to solve the loop closure problem using only spatial information. The key idea is to use a novel continuous and probabilistic representations of terrain elevation maps. Given 3D point clouds of the environment, the proposed approach exploits Gaussian Process (GP) regression with linear operators to generate continuous gradient maps of the terrain elevation information. Traditional image registration techniques are then used to search for potential matches. Loop closures are verified by leveraging both the spatial characteristic of the elevation maps (SE(2) registration) and the probabilistic nature of the GP representation. A submap-based localization and mapping framework is used to demonstrate the validity of the proposed approach. The performance of this pipeline is evaluated and benchmarked using real data from a rover that is equipped with a stereo camera and navigates in challenging, unstructured planetary-like environments in Morocco and on Mt. Etna.