 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearn by Observation: Imitation Learning for Drone Patrolling from Videos of A Human Navigator
Paper and Code
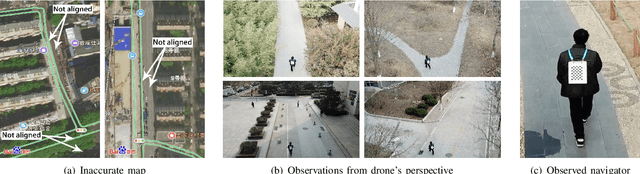
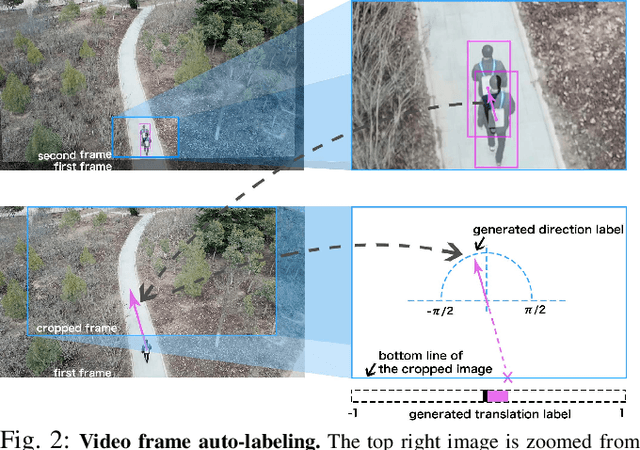
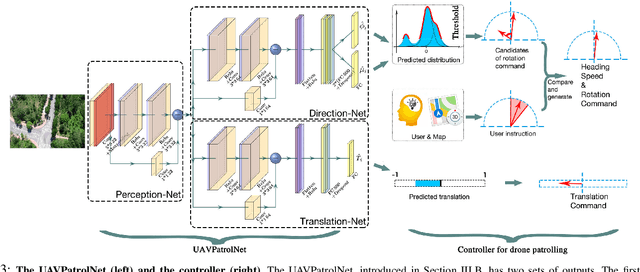
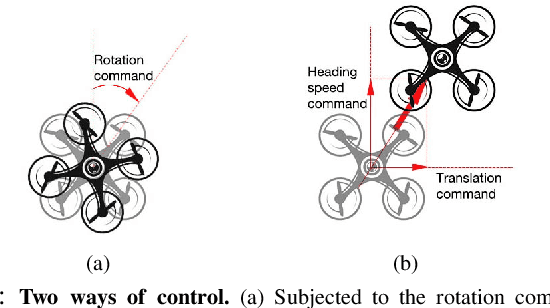
We present an imitation learning method for autonomous drone patrolling based only on raw videos. Different from previous methods, we propose to let the drone learn patrolling in the air by observing and imitating how a human navigator does it on the ground. The observation process enables the automatic collection and annotation of data using inter-frame geometric consistency, resulting in less manual effort and high accuracy. Then a newly designed neural network is trained based on the annotated data to predict appropriate directions and translations for the drone to patrol in a lane-keeping manner as humans. Our method allows the drone to fly at a high altitude with a broad view and low risk. It can also detect all accessible directions at crossroads and further carry out the integration of available user instructions and autonomous patrolling control commands. Extensive experiments are conducted to demonstrate the accuracy of the proposed imitating learning process as well as the reliability of the holistic system for autonomous drone navigation. The codes, datasets as well as video demonstrations are available at https://vsislab.github.io/uavpatrol