 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe MRS UAV System: Pushing the Frontiers of Reproducible Research, Real-world Deployment, and Education with Autonomous Unmanned Aerial Vehicles
Paper and Code

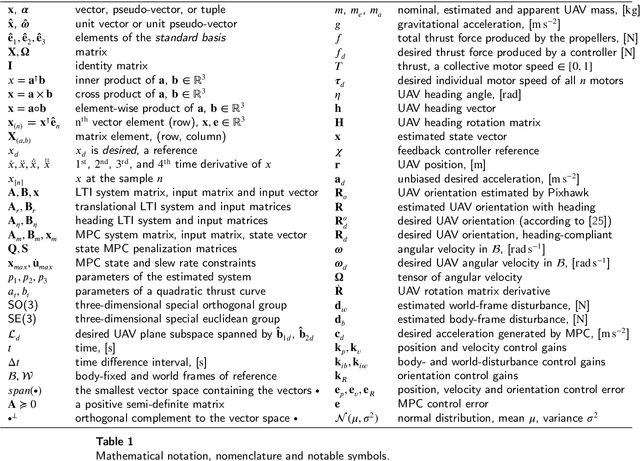
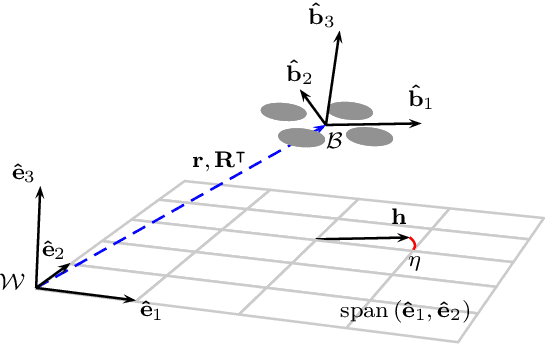
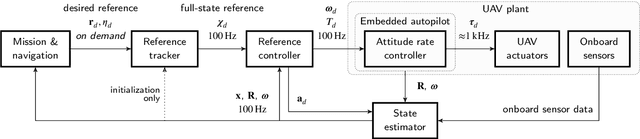
We present a multirotor Unmanned Aerial Vehicle control (UAV) and estimation system for supporting replicable research through realistic simulations and real-world experiments. We propose a unique multi-frame localization paradigm for estimating the states of a UAV in various frames of reference using multiple sensors simultaneously. The system enables complex missions in GNSS and GNSS-denied environments, including outdoor-indoor transitions and the execution of redundant estimators for backing up unreliable localization sources. Two feedback control designs are presented: one for precise and aggressive maneuvers, and the other for stable and smooth flight with a noisy state estimate. The proposed control and estimation pipeline are constructed without using the Euler/Tait-Bryan angle representation of orientation in 3D. Instead, we rely on rotation matrices and a novel heading-based convention to represent the one free rotational degree-of-freedom in 3D of a standard multirotor helicopter. We provide an actively maintained and well-documented open-source implementation, including realistic simulation of UAV, sensors, and localization systems. The proposed system is the product of years of applied research on multi-robot systems, aerial swarms, aerial manipulation, motion planning, and remote sensing. All our results have been supported by real-world system deployment that shaped the system into the form presented here. In addition, the system was utilized during the participation of our team from the CTU in Prague in the prestigious MBZIRC 2017 and 2020 robotics competitions, and also in the DARPA SubT challenge. Each time, our team was able to secure top places among the best competitors from all over the world. On each occasion, the challenges has motivated the team to improve the system and to gain a great amount of high-quality experience within tight deadlines.