 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAMENet: Attentive Maps Encoder Network for Trajectory Prediction
Paper and Code

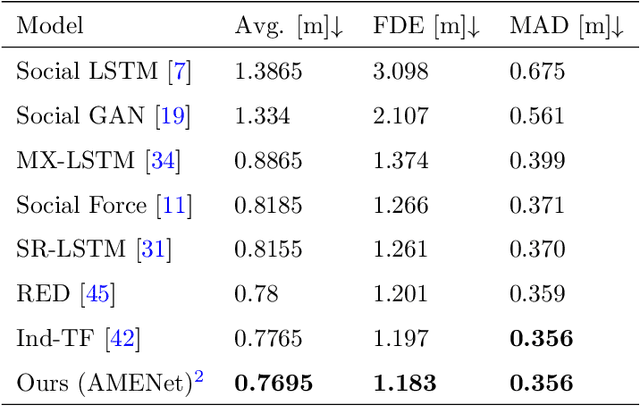
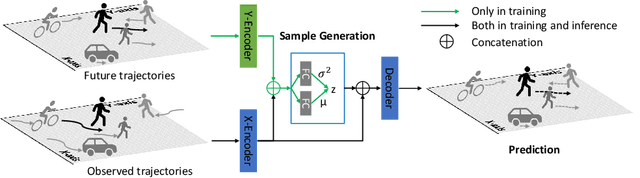
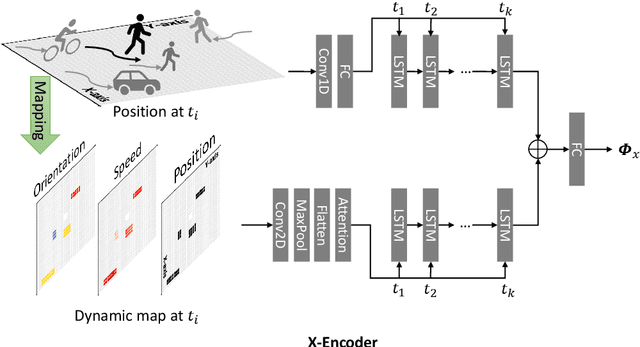
Trajectory prediction is a crucial task in different communities, such as intelligent transportation systems, photogrammetry, computer vision, and mobile robot applications. However, there are many challenges to predict the trajectories of heterogeneous road agents (e.g. pedestrians, cyclists and vehicles) at a microscopical level. For example, an agent might be able to choose multiple plausible paths in complex interactions with other agents in varying environments, and the behavior of each agent is affected by the various behaviors of its neighboring agents. To this end, we propose an end-to-end generative model named Attentive Maps Encoder Network (AMENet) for accurate and realistic multi-path trajectory prediction. Our method leverages the target road user's motion information (i.e. movement in xy-axis in a Cartesian space) and the interaction information with the neighboring road users at each time step, which is encoded as dynamic maps that are centralized on the target road user. A conditional variational auto-encoder module is trained to learn the latent space of possible future paths based on the dynamic maps and then used to predict multiple plausible future trajectories conditioned on the observed past trajectories. Our method reports the new state-of-the-art performance (final/mean average displacement (FDE/MDE) errors 1.183/0.356 meters) on benchmark datasets and wins the first place in the open challenge of Trajnet.