 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimum Potential Energy of Point Cloud for Robust Global Registration
Paper and Code
Jun 12, 2020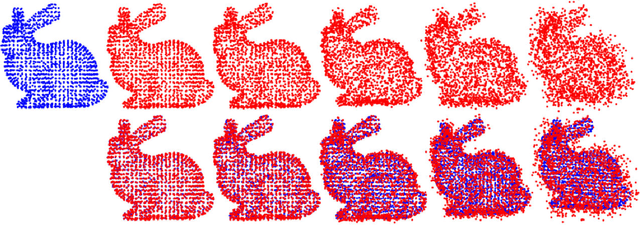
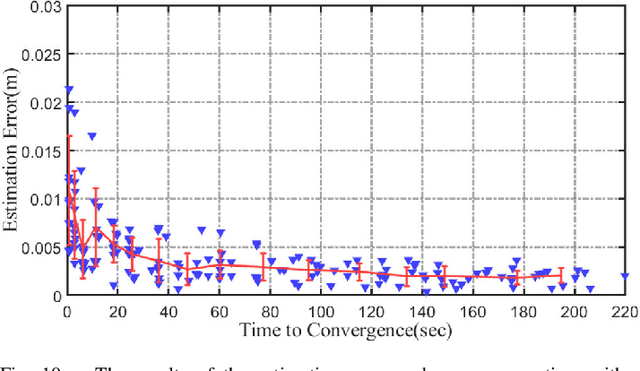
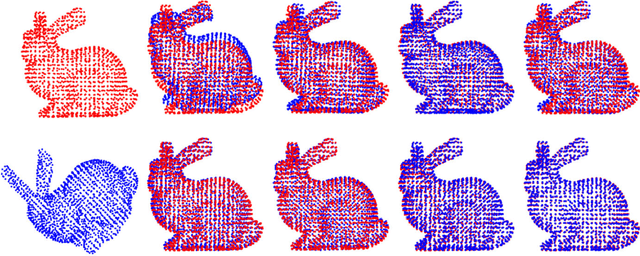
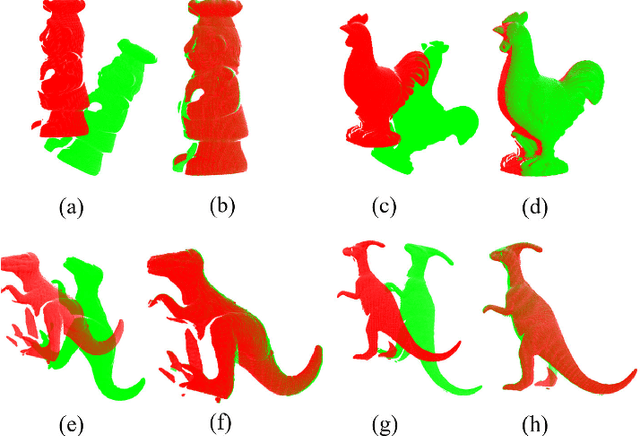
In this paper, we propose a novel minimum gravitational potential energy (MPE)-based algorithm for global point set registration. The feature descriptors extraction algorithms have emerged as the standard approach to align point sets in the past few decades. However, the alignment can be challenging to take effect when the point set suffers from raw point data problems such as noises (Gaussian and Uniformly). Different from the most existing point set registration methods which usually extract the descriptors to find correspondences between point sets, our proposed MPE alignment method is able to handle large scale raw data offset without depending on traditional descriptors extraction, whether for the local or global registration methods. We decompose the solution into a global optimal convex approximation and the fast descent process to a local minimum. For the approximation step, the proposed minimum potential energy (MPE) approach consists of two main steps. Firstly, according to the construction of the force traction operator, we could simply compute the position of the potential energy minimum; Secondly, with respect to the finding of the MPE point, we propose a new theory that employs the two flags to observe the status of the registration procedure. The method of fast descent process to the minimum that we employed is the iterative closest point algorithm; it can achieve the global minimum. We demonstrate the performance of the proposed algorithm on synthetic data as well as on real data. The proposed method outperforms the other global methods in terms of both efficiency, accuracy and noise resistance.