 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIdentifying Causal Structure in Dynamical Systems
Paper and Code
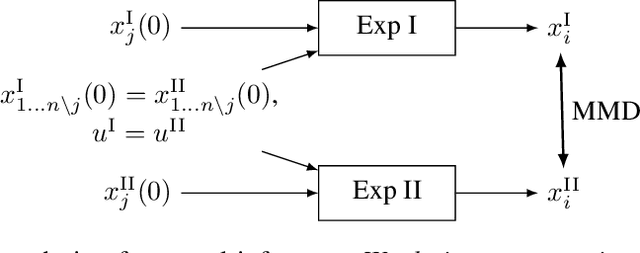
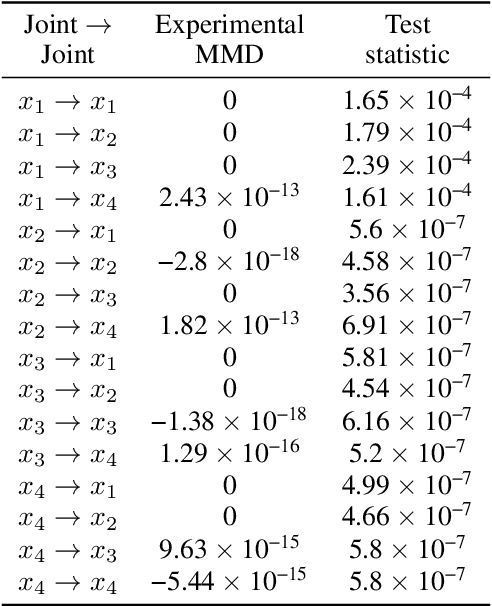
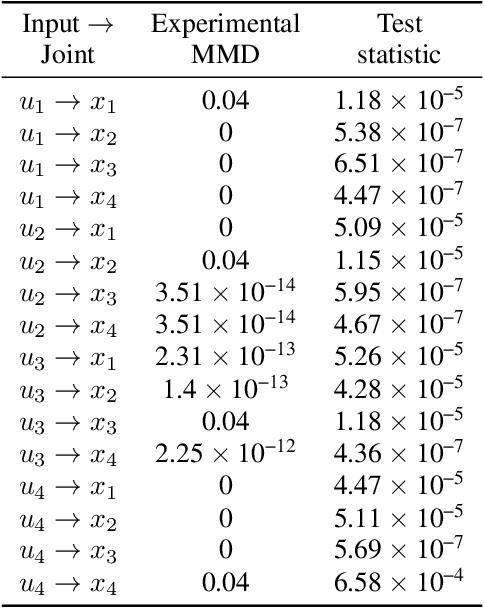
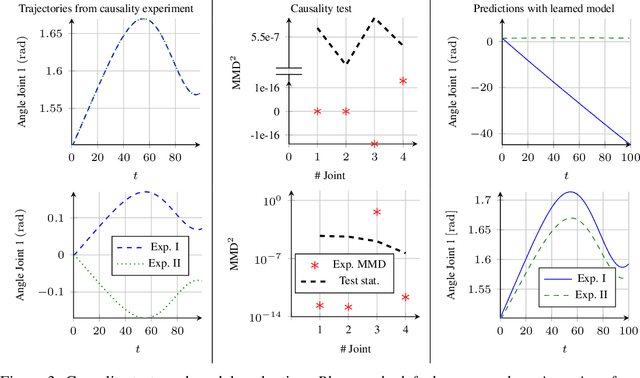
We present a method for automatically identifying the causal structure of a dynamical control system. Through a suitable experiment design and subsequent causal analysis, the method reveals, which state and input variables of the system have a causal influence on each other. The experiment design builds on the concept of controllability, which provides a systematic way to compute input trajectories that steer the system to specific regions in its state space. For the causal analysis, we leverage powerful techniques from causal inference and extend them to control systems. Further, we derive conditions that guarantee discovery of the true causal structure of the system and show that the obtained knowledge of the causal structure reduces the complexity of model learning and yields improved generalization capabilities. Experiments on a robot arm demonstrate reliable causal identification from real-world data and extrapolation to regions outside the training domain.