 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSense-Assess-eXplain (SAX): Building Trust in Autonomous Vehicles in Challenging Real-World Driving Scenarios
Paper and Code
May 05, 2020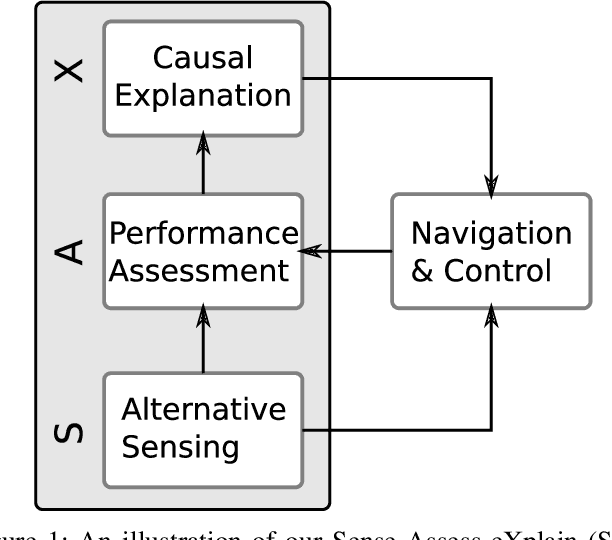

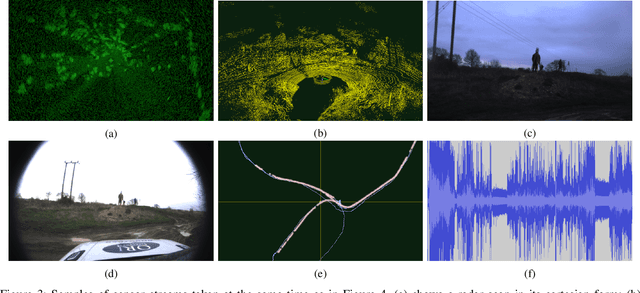

This paper discusses ongoing work in demonstrating research in mobile autonomy in challenging driving scenarios. In our approach, we address fundamental technical issues to overcome critical barriers to assurance and regulation for large-scale deployments of autonomous systems. To this end, we present how we build robots that (1) can robustly sense and interpret their environment using traditional as well as unconventional sensors; (2) can assess their own capabilities; and (3), vitally in the purpose of assurance and trust, can provide causal explanations of their interpretations and assessments. As it is essential that robots are safe and trusted, we design, develop, and demonstrate fundamental technologies in real-world applications to overcome critical barriers which impede the current deployment of robots in economically and socially important areas. Finally, we describe ongoing work in the collection of an unusual, rare, and highly valuable dataset.