 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Planar Regularities for Point Line Visual-Inertial Odometry
Paper and Code
Apr 16, 2020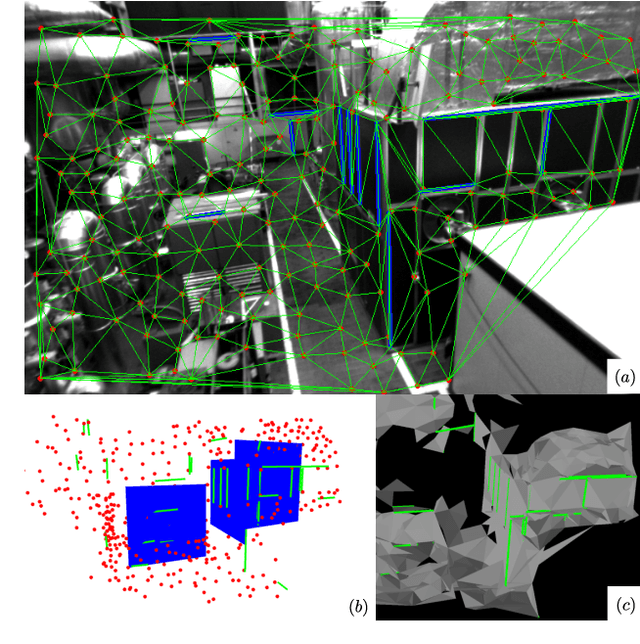
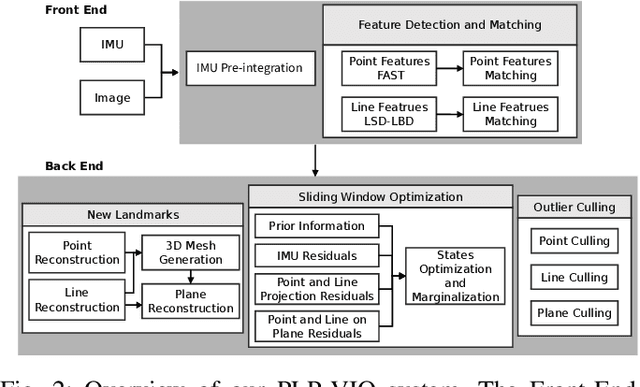
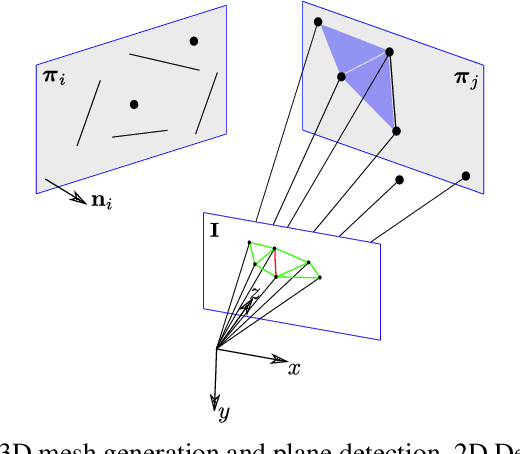
With monocular Visual-Inertial Odometry (VIO) system, 3D point cloud and camera motion can be estimated simultaneously. Because pure sparse 3D points provide a structureless representation of the environment, generating 3D mesh from sparse points can further model the environment topology and produce dense mapping. To improve the accuracy of 3D mesh generation and localization, we propose a tightly-coupled monocular VIO system, PLP-VIO, which exploits point features and line features as well as plane regularities. The co-planarity constraints are used to leverage additional structure information for the more accurate estimation of 3D points and spatial lines in state estimator. To detect plane and 3D mesh robustly, we combine both the line features with point features in the detection method. The effectiveness of the proposed method is verified on both synthetic data and public datasets and is compared with other state-of-the-art algorithms.