 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolyLaneNet: Lane Estimation via Deep Polynomial Regression
Paper and Code
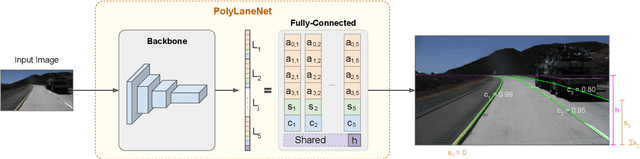
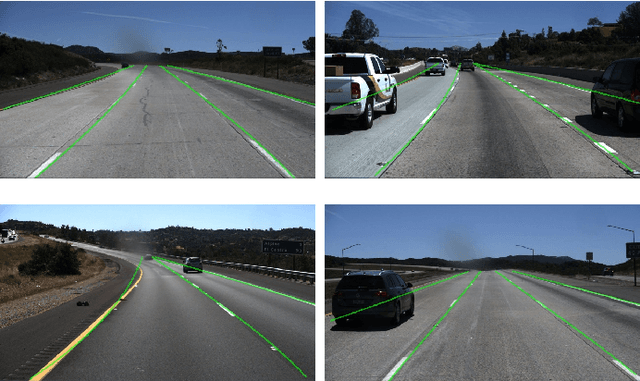
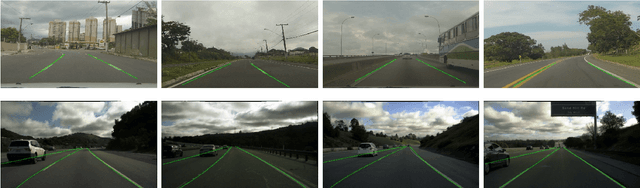
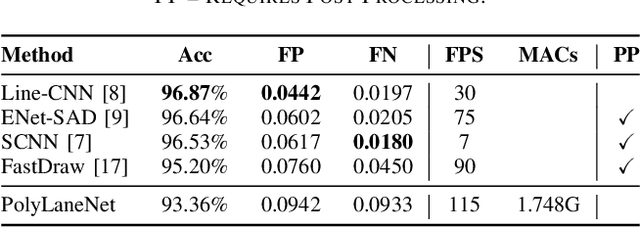
One of the main factors that contributed to the large advances in autonomous driving is the advent of deep learning. For safer self-driving vehicles, one of the problems that has yet to be solved completely is lane detection. Since methods for this task have to work in real time (+30 FPS), they not only have to be effective (i.e., have high accuracy) but they also have to be efficient (i.e., fast). In this work, we present a novel method for lane detection that uses as input an image from a forward-looking camera mounted in the vehicle and outputs polynomials representing each lane marking in the image, via deep polynomial regression. The proposed method is shown to be competitive with existing state-of-the-art methods in the TuSimple dataset, while maintaining its efficiency (115 FPS). Additionally, extensive qualitative results on two additional public datasets are presented, alongside with limitations in the evaluation metrics used by recent works for lane detection. Finally, we provide source code and trained models that allow others to replicate all the results shown in this paper, which is surprisingly rare in state-of-the-art lane detection methods.