 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning 3D Semantic Scene Graphs from 3D Indoor Reconstructions
Paper and Code
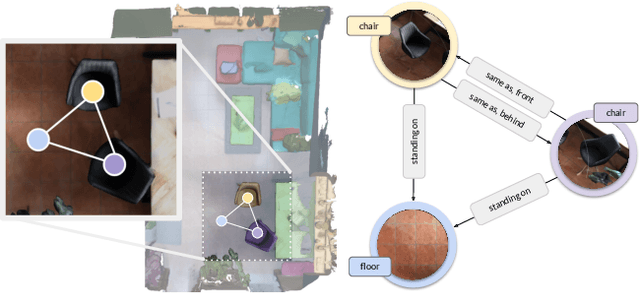
Scene understanding has been of high interest in computer vision. It encompasses not only identifying objects in a scene, but also their relationships within the given context. With this goal, a recent line of works tackles 3D semantic segmentation and scene layout prediction. In our work we focus on scene graphs, a data structure that organizes the entities of a scene in a graph, where objects are nodes and their relationships modeled as edges. We leverage inference on scene graphs as a way to carry out 3D scene understanding, mapping objects and their relationships. In particular, we propose a learned method that regresses a scene graph from the point cloud of a scene. Our novel architecture is based on PointNet and Graph Convolutional Networks (GCN). In addition, we introduce 3DSSG, a semi-automatically generated dataset, that contains semantically rich scene graphs of 3D scenes. We show the application of our method in a domain-agnostic retrieval task, where graphs serve as an intermediate representation for 3D-3D and 2D-3D matching.