 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBoundary-Aware Dense Feature Indicator for Single-Stage 3D Object Detection from Point Clouds
Paper and Code
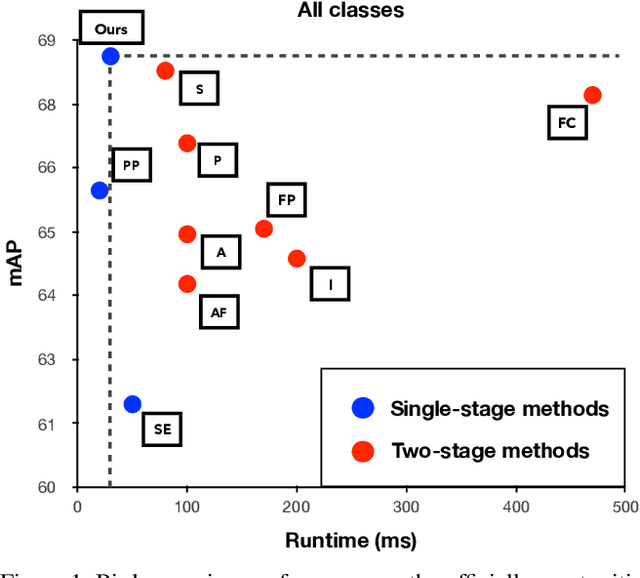

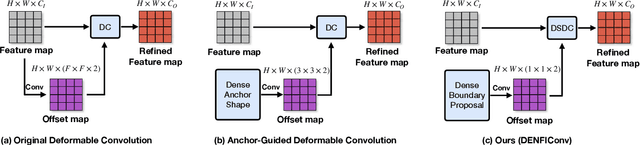
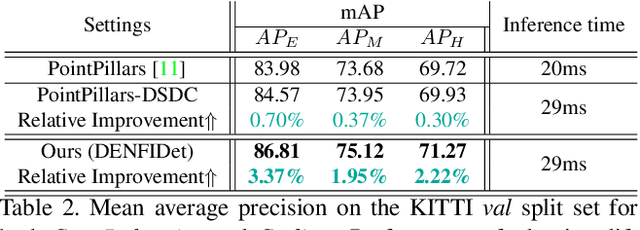
3D object detection based on point clouds has become more and more popular. Some methods propose localizing 3D objects directly from raw point clouds to avoid information loss. However, these methods come with complex structures and significant computational overhead, limiting its broader application in real-time scenarios. Some methods choose to transform the point cloud data into compact tensors first and leverage off-the-shelf 2D detectors to propose 3D objects, which is much faster and achieves state-of-the-art results. However, because of the inconsistency between 2D and 3D data, we argue that the performance of compact tensor-based 3D detectors is restricted if we use 2D detectors without corresponding modification. Specifically, the distribution of point clouds is uneven, with most points gather on the boundary of objects, while detectors for 2D data always extract features evenly. Motivated by this observation, we propose DENse Feature Indicator (DENFI), a universal module that helps 3D detectors focus on the densest region of the point clouds in a boundary-aware manner. Moreover, DENFI is lightweight and guarantees real-time speed when applied to 3D object detectors. Experiments on KITTI dataset show that DENFI improves the performance of the baseline single-stage detector remarkably, which achieves new state-of-the-art performance among previous 3D detectors, including both two-stage and multi-sensor fusion methods, in terms of mAP with a 34FPS detection speed.