 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKFNet: Learning Temporal Camera Relocalization using Kalman Filtering
Paper and Code
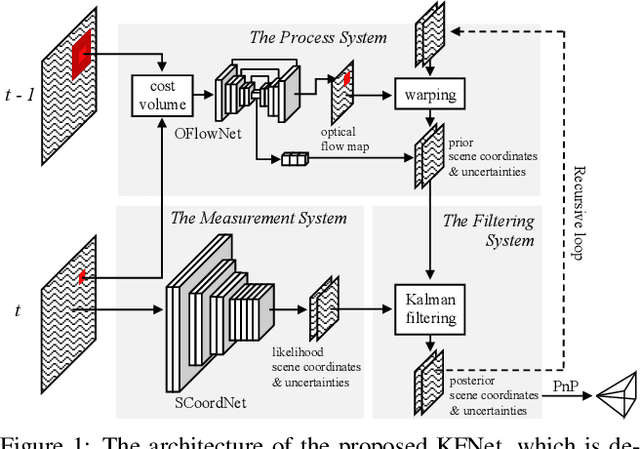
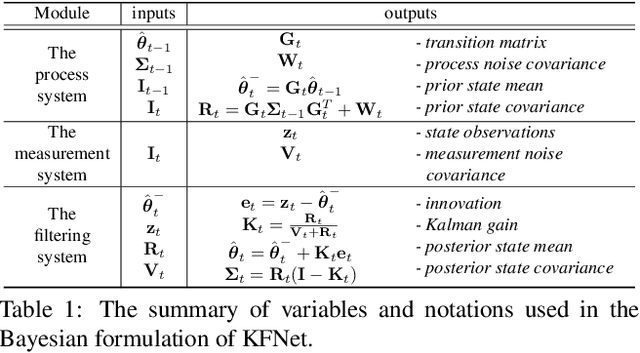
Temporal camera relocalization estimates the pose with respect to each video frame in sequence, as opposed to one-shot relocalization which focuses on a still image. Even though the time dependency has been taken into account, current temporal relocalization methods still generally underperform the state-of-the-art one-shot approaches in terms of accuracy. In this work, we improve the temporal relocalization method by using a network architecture that incorporates Kalman filtering (KFNet) for online camera relocalization. In particular, KFNet extends the scene coordinate regression problem to the time domain in order to recursively establish 2D and 3D correspondences for the pose determination. The network architecture design and the loss formulation are based on Kalman filtering in the context of Bayesian learning. Extensive experiments on multiple relocalization benchmarks demonstrate the high accuracy of KFNet at the top of both one-shot and temporal relocalization approaches. Our codes are released at https://github.com/zlthinker/KFNet.