 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-Local Part-Aware Point Cloud Denoising
Paper and Code
Mar 14, 2020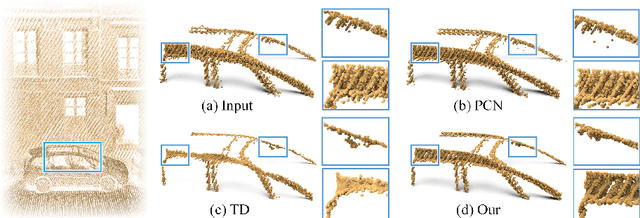
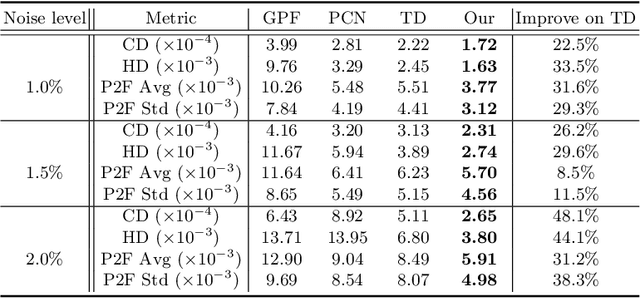

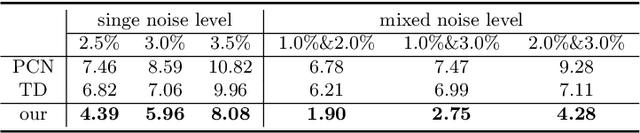
This paper presents a novel non-local part-aware deep neural network to denoise point clouds by exploring the inherent non-local self-similarity in 3D objects and scenes. Different from existing works that explore small local patches, we design the non-local learning unit (NLU) customized with a graph attention module to adaptively capture non-local semantically-related features over the entire point cloud. To enhance the denoising performance, we cascade a series of NLUs to progressively distill the noise features from the noisy inputs. Further, besides the conventional surface reconstruction loss, we formulate a semantic part loss to regularize the predictions towards the relevant parts and enable denoising in a part-aware manner. Lastly, we performed extensive experiments to evaluate our method, both quantitatively and qualitatively, and demonstrate its superiority over the state-of-the-arts on both synthetic and real-scanned noisy inputs.