 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End Learning Local Multi-view Descriptors for 3D Point Clouds
Paper and Code
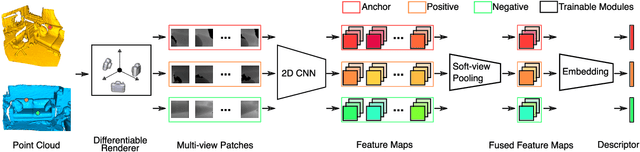
In this work, we propose an end-to-end framework to learn local multi-view descriptors for 3D point clouds. To adopt a similar multi-view representation, existing studies use hand-crafted viewpoints for rendering in a preprocessing stage, which is detached from the subsequent descriptor learning stage. In our framework, we integrate the multi-view rendering into neural networks by using a differentiable renderer, which allows the viewpoints to be optimizable parameters for capturing more informative local context of interest points. To obtain discriminative descriptors, we also design a soft-view pooling module to attentively fuse convolutional features across views. Extensive experiments on existing 3D registration benchmarks show that our method outperforms existing local descriptors both quantitatively and qualitatively.