 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhole-Body Walking Generation using Contact Parametrization: A Non-Linear Trajectory Optimization Approach
Paper and Code
Mar 10, 2020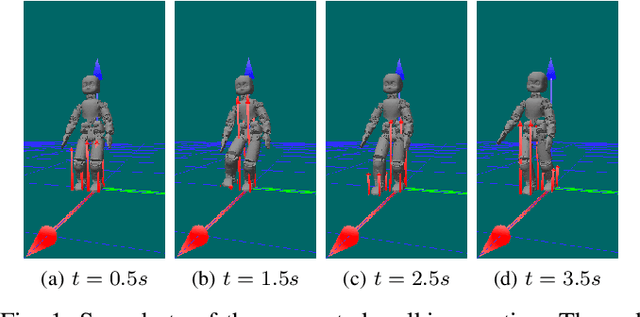
In this paper, we describe a planner capable of generating walking trajectories by using the centroidal dynamics and the full kinematics of a humanoid robot model. The interaction between the robot and the walking surface is modeled explicitly through a novel contact parametrization. The approach is complementarity-free and does not need a predefined contact sequence. By solving an optimal control problem we obtain walking trajectories. In particular, through a set of constraints and dynamic equations, we model the robot in contact with the ground. We describe the objective the robot needs to achieve with a set of tasks. The whole optimal control problem is transcribed into an optimization problem via a Direct Multiple Shooting approach and solved with an off-the-shelf solver. We show that it is possible to achieve walking motions automatically by specifying a minimal set of references, such as a constant desired Center of Mass velocity and a reference point on the ground.