 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAsynchronous and Parallel Distributed Pose Graph Optimization
Paper and Code
Mar 06, 2020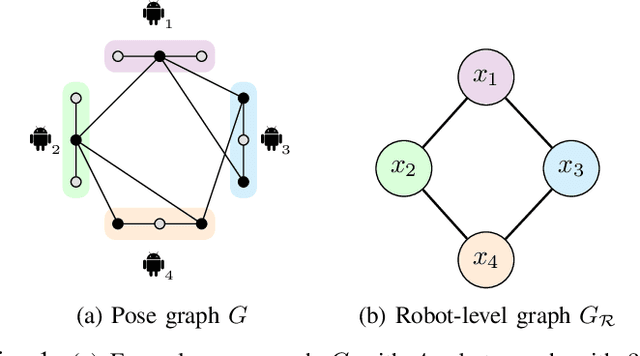
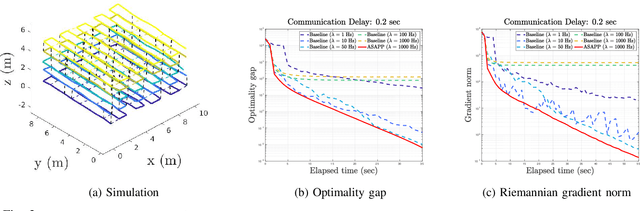
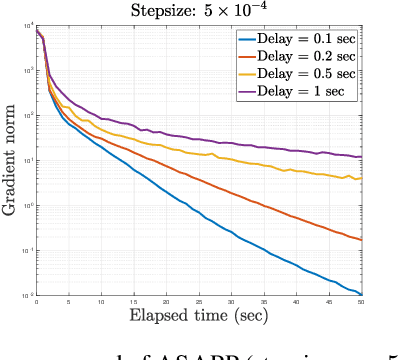
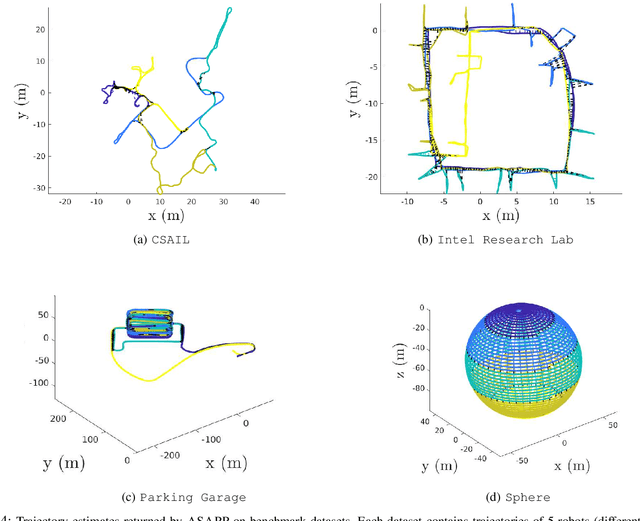
We present Asynchronous Stochastic Parallel Pose Graph Optimization (ASAPP), the first asynchronous algorithm for distributed pose graph optimization (PGO) in multi-robot simultaneous localization and mapping. By enabling robots to optimize their local trajectory estimates without synchronization, ASAPP offers resiliency against communication delays and alleviates the need to wait for stragglers in the network. Furthermore, the same algorithm can be used to solve the so-called rank-restricted semidefinite relaxations of PGO, a crucial class of non-convex Riemannian optimization problems at the center of recent PGO solvers with global optimality guarantees. Under bounded delay, we establish the global first-order convergence of ASAPP using a sufficiently small stepsize. The derived stepsize depends on the worst-case delay and inherent problem sparsity, and furthermore matches known result for synchronous algorithms when delay is zero. Numerical evaluations on both simulated and real-world SLAM datasets demonstrate the speedup achieved with ASAPP and show the algorithm's resilience against a wide range of communication delays in practice.