 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBalance Between Efficient and Effective Learning: Dense2Sparse Reward Shaping for Robot Manipulation with Environment Uncertainty
Paper and Code
Mar 05, 2020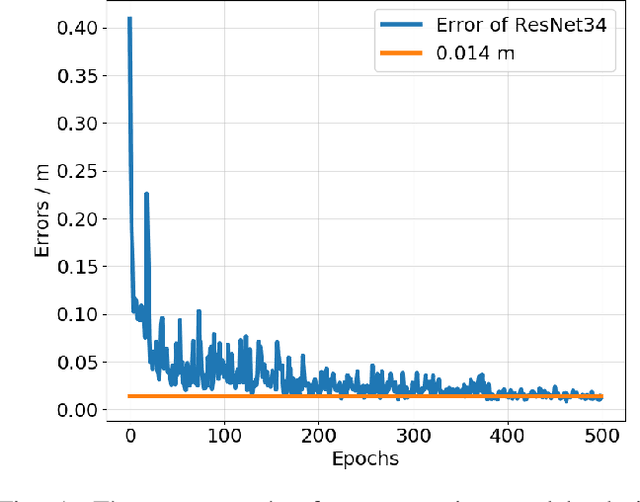
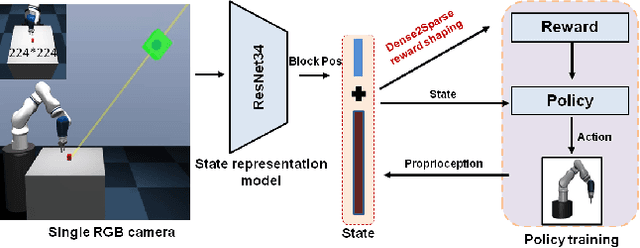
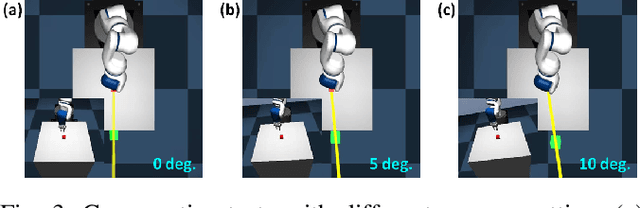
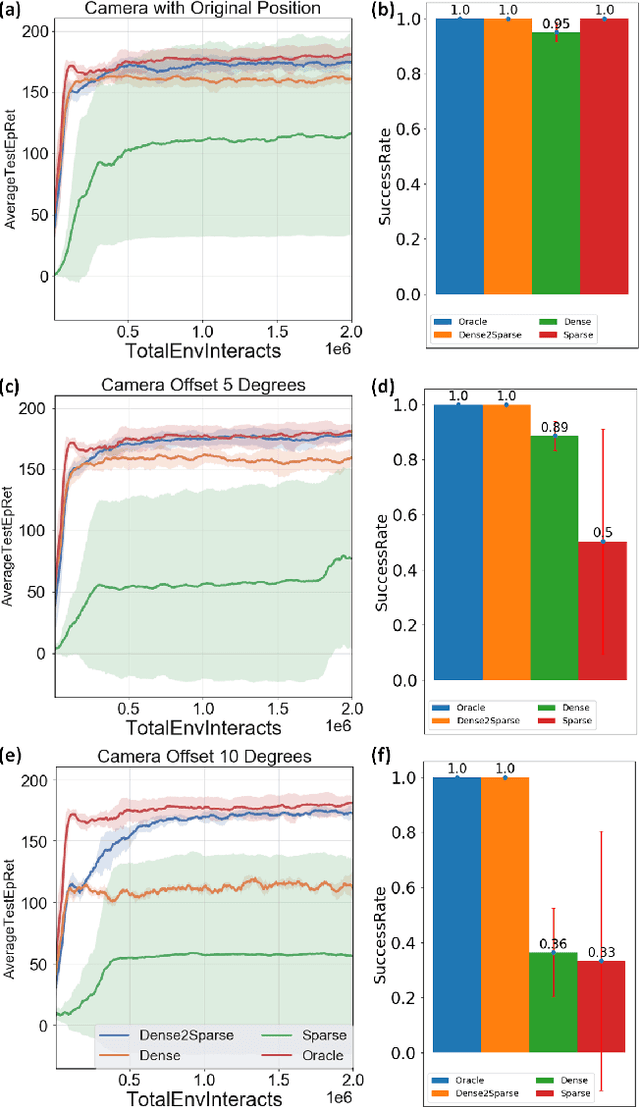
Efficient and effective learning is one of the ultimate goals of the deep reinforcement learning (DRL), although the compromise has been made in most of the time, especially for the application of robot manipulations. Learning is always expensive for robot manipulation tasks and the learning effectiveness could be affected by the system uncertainty. In order to solve above challenges, in this study, we proposed a simple but powerful reward shaping method, namely Dense2Sparse. It combines the advantage of fast convergence of dense reward and the noise isolation of the sparse reward, to achieve a balance between learning efficiency and effectiveness, which makes it suitable for robot manipulation tasks. We evaluated our Dense2Sparse method with a series of ablation experiments using the state representation model with system uncertainty. The experiment results show that the Dense2Sparse method obtained higher expected reward compared with the ones using standalone dense reward or sparse reward, and it also has a superior tolerance of system uncertainty.