 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussian-Process-based Robot Learning from Demonstration
Paper and Code
Feb 23, 2020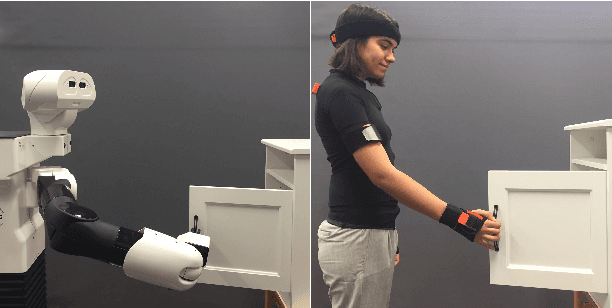

Endowed with higher levels of autonomy, robots are required to perform increasingly complex manipulation tasks. Learning from demonstration is arising as a promising paradigm for easily extending robot capabilities so that they adapt to unseen scenarios. We present a novel Gaussian-Process-based approach for learning manipulation skills from observations of a human teacher. This probabilistic representation allows to generalize over multiple demonstrations, and encode uncertainty variability along the different phases of the task. In this paper, we address how Gaussian Processes can be used to effectively learn a policy from trajectories in task space. We also present a method to efficiently adapt the policy to fulfill new requirements, and to modulate the robot behavior as a function of task uncertainty. This approach is illustrated through a real-world application using the TIAGo robot.