 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperimental Evaluation of Human Motion Prediction: Toward Safe and Efficient Human Robot Collaboration
Paper and Code
Jan 27, 2020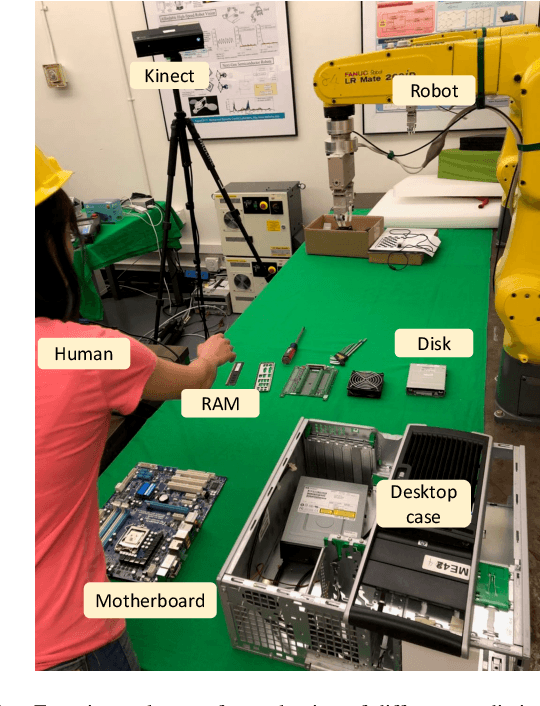
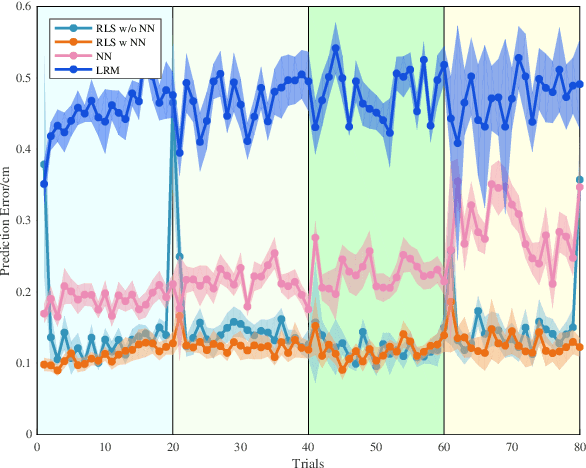
Human motion prediction is non-trivial in modern industrial settings. Accurate prediction of human motion can not only improve efficiency in human robot collaboration, but also enhance human safety in close proximity to robots. Among existing prediction models, the parameterization and identification methods of those models vary. It remains unclear what is the necessary parameterization of a prediction model, whether online adaptation of the model is necessary, and whether prediction can help improve safety and efficiency during human robot collaboration. These problems result from the difficulty to quantitatively evaluate various prediction models in a closed-loop fashion in real human-robot interaction settings. This paper develops a method to evaluate the closed-loop performance of different prediction models. In particular, we compare models with different parameterizations and models with or without online parameter adaptation. Extensive experiments were conducted on a human robot collaboration platform. The experimental results demonstrated that human motion prediction significantly enhanced the collaboration efficiency and human safety. Adaptable prediction models that were parameterized by neural networks achieved the best performance.