 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Feature-Based Point Registration Using Directional Mixture Model
Paper and Code
Nov 25, 2019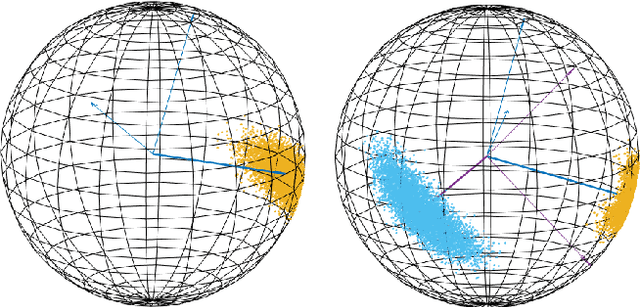
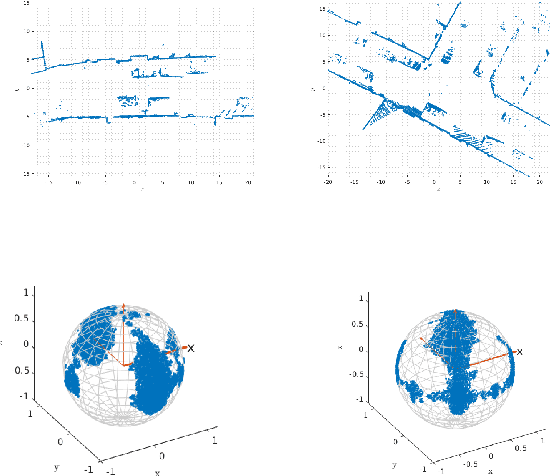
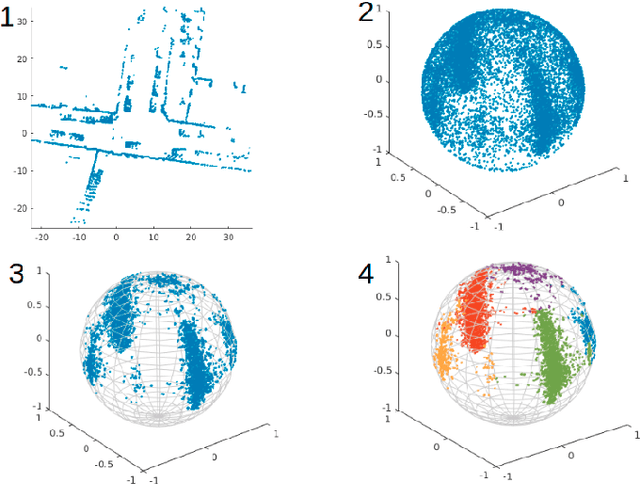
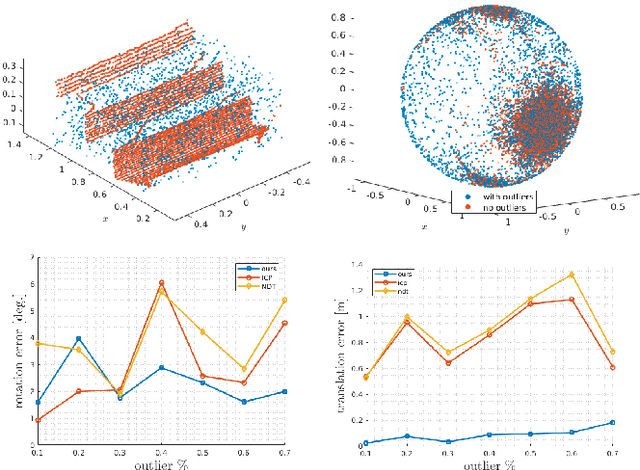
This paper presents a robust probabilistic point registration method for estimating the rigid transformation (i.e. rotation matrix and translation vector) between two pointcloud dataset. The method improves the robustness of point registration and consequently the robot localization in the presence of outliers in the pointclouds which always occurs due to occlusion, dynamic objects, and sensor errors. The framework models the point registration task based on directional statistics on a unit sphere. In particular, a Kent distribution mixture model is adopted and the process of point registration has been carried out in the two phases of Expectation-Maximization algorithm. The proposed method has been evaluated on the pointcloud dataset from LiDAR sensors in an indoor environment.