Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarking Image Sensors Under Adverse Weather Conditions for Autonomous Driving
Paper and Code
Dec 06, 2019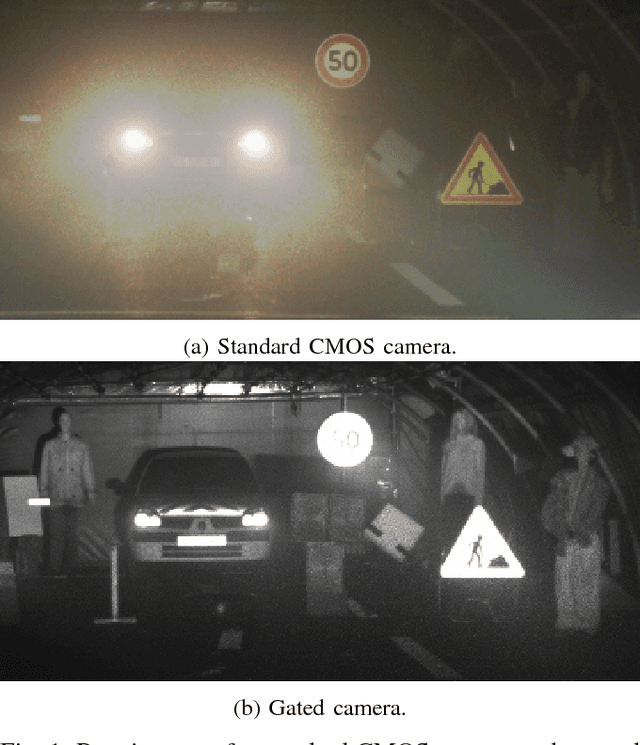
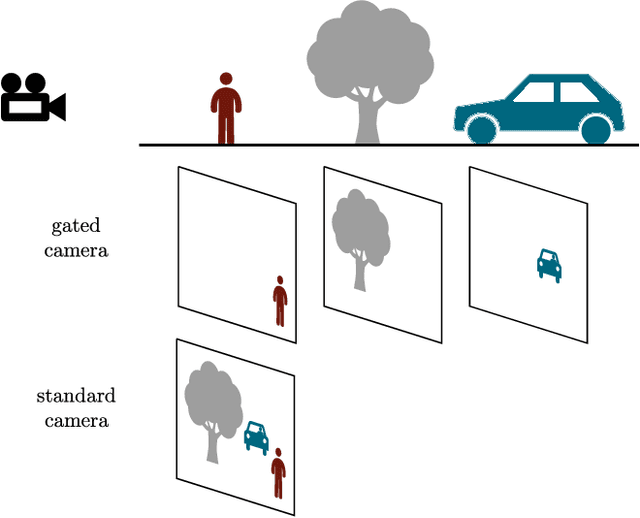
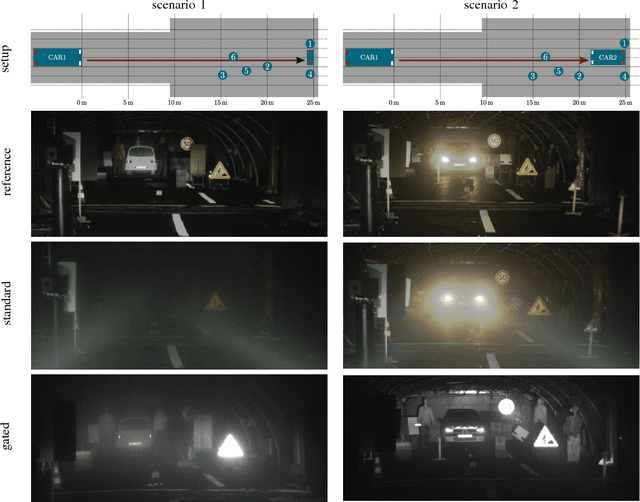
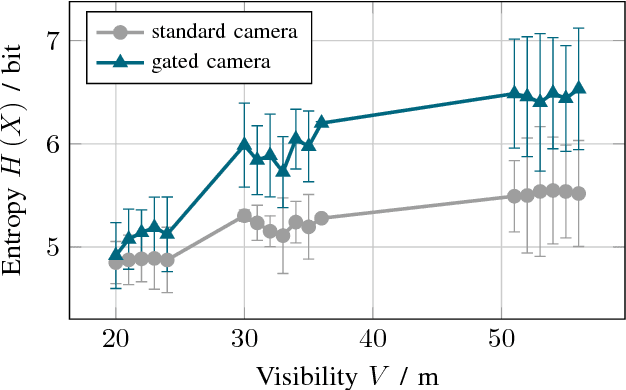
Adverse weather conditions are very challenging for autonomous driving because most of the state-of-the-art sensors stop working reliably under these conditions. In order to develop robust sensors and algorithms, tests with current sensors in defined weather conditions are crucial for determining the impact of bad weather for each sensor. This work describes a testing and evaluation methodology that helps to benchmark novel sensor technologies and compare them to state-of-the-art sensors. As an example, gated imaging is compared to standard imaging under foggy conditions. It is shown that gated imaging outperforms state-of-the-art standard passive imaging due to time-synchronized active illumination.
* Published in: 2018 IEEE Intelligent Vehicles Symposium (IV)
View paper on