 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Stereo using Adaptive Thin Volume Representation with Uncertainty Awareness
Paper and Code
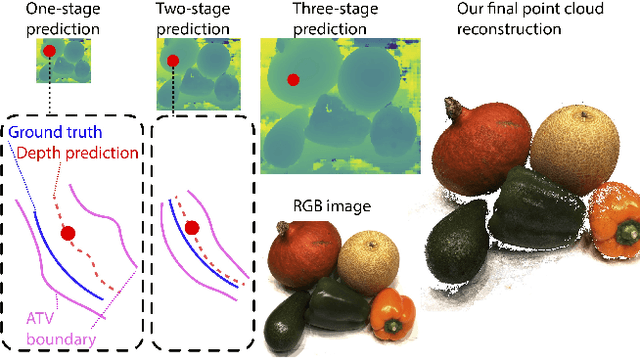
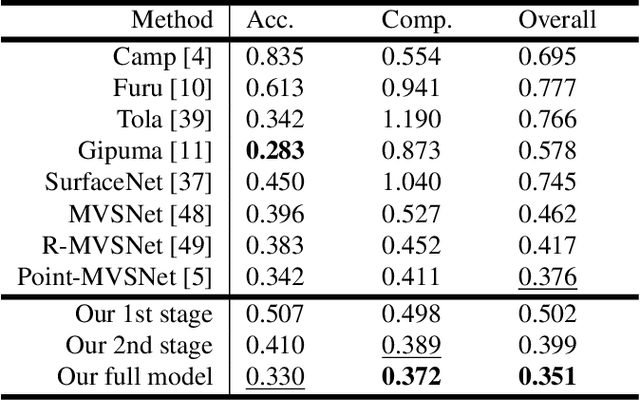
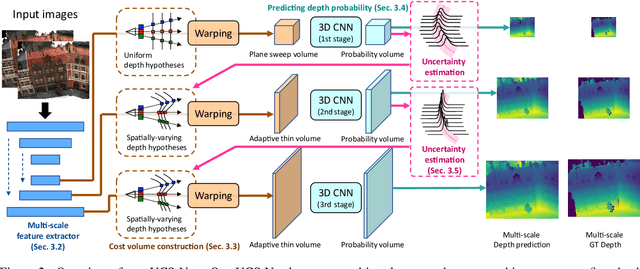

We present Uncertainty-aware Cascaded Stereo Network (UCS-Net) for 3D reconstruction from multiple RGB images. Multi-view stereo (MVS) aims to reconstruct fine-grained scene geometry from multi-view images. Previous learning-based MVS methods estimate per-view depth using plane sweep volumes with a fixed depth hypothesis at each plane; this generally requires densely sampled planes for desired accuracy, and it is very hard to achieve high-resolution depth. In contrast, we propose adaptive thin volumes (ATVs); in an ATV, the depth hypothesis of each plane is spatially varying, which adapts to the uncertainties of previous per-pixel depth predictions. Our UCS-Net has three stages: the first stage processes a small standard plane sweep volume to predict low-resolution depth; two ATVs are then used in the following stages to refine the depth with higher resolution and higher accuracy. Our ATV consists of only a small number of planes; yet, it efficiently partitions local depth ranges within learned small intervals. In particular, we propose to use variance-based uncertainty estimates to adaptively construct ATVs; this differentiable process introduces reasonable and fine-grained spatial partitioning. Our multi-stage framework progressively subdivides the vast scene space with increasing depth resolution and precision, which enables scene reconstruction with high completeness and accuracy in a coarse-to-fine fashion. We demonstrate that our method achieves superior performance compared with state-of-the-art benchmarks on various challenging datasets.