 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Probabilistic Vehicle Trajectory Prediction Through Physically Feasible Bayesian Recurrent Neural Network
Paper and Code
Nov 11, 2019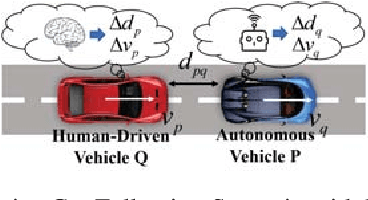
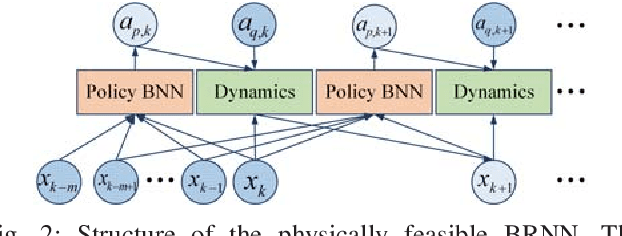
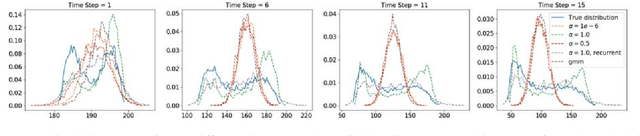
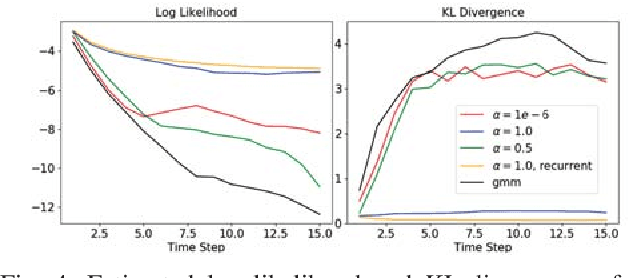
Probabilistic vehicle trajectory prediction is essential for robust safety of autonomous driving. Current methods for long-term trajectory prediction cannot guarantee the physical feasibility of predicted distribution. Moreover, their models cannot adapt to the driving policy of the predicted target human driver. In this work, we propose to overcome these two shortcomings by a Bayesian recurrent neural network model consisting of Bayesian-neural-network-based policy model and known physical model of the scenario. Bayesian neural network can ensemble complicated output distribution, enabling rich family of trajectory distribution. The embedded physical model ensures feasibility of the distribution. Moreover, the adopted gradient-based training method allows direct optimization for better performance in long prediction horizon. Furthermore, a particle-filter-based parameter adaptation algorithm is designed to adapt the policy Bayesian neural network to the predicted target online. Effectiveness of the proposed methods is verified with a toy example with multi-modal stochastic feedback gain and naturalistic car following data.