 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBAIL: Best-Action Imitation Learning for Batch Deep Reinforcement Learning
Paper and Code
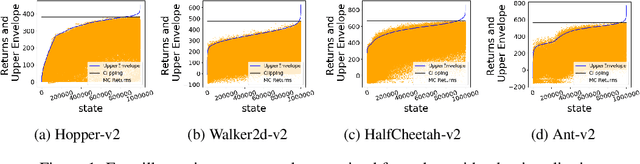


The field of Deep Reinforcement Learning (DRL) has recently seen a surge in research in batch reinforcement learning, which aims for sample-efficient learning from a given data set without additional interactions with the environment. In the batch DRL setting, commonly employed off-policy DRL algorithms can perform poorly and sometimes even fail to learn altogether. In this paper, we propose a new algorithm, Best-Action Imitation Learning (BAIL), which unlike many off-policy DRL algorithms does not involve maximizing Q functions over the action space. Striving for simplicity as well as performance, BAIL first selects from the batch the actions it believes to be high-performing actions for their corresponding states; it then uses those state-action pairs to train a policy network using imitation learning. Although BAIL is simple, we demonstrate that BAIL achieves state of the art performance on the Mujoco benchmark.