 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlowNorm: A Learning-based Method for Increasing Convergence Range of Direct Alignment
Paper and Code
Oct 16, 2019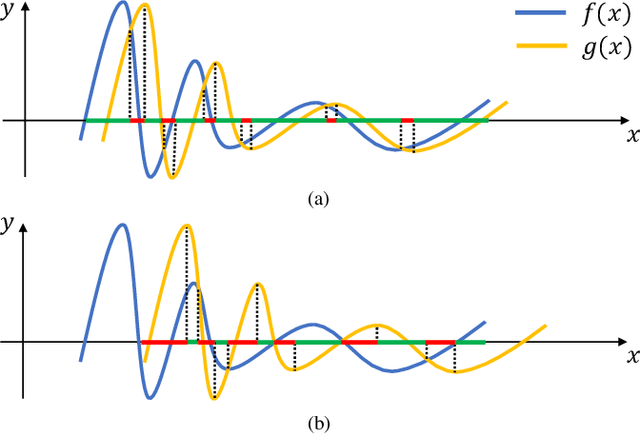
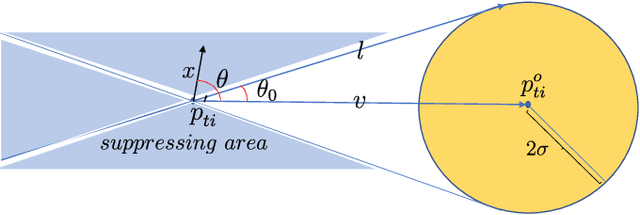
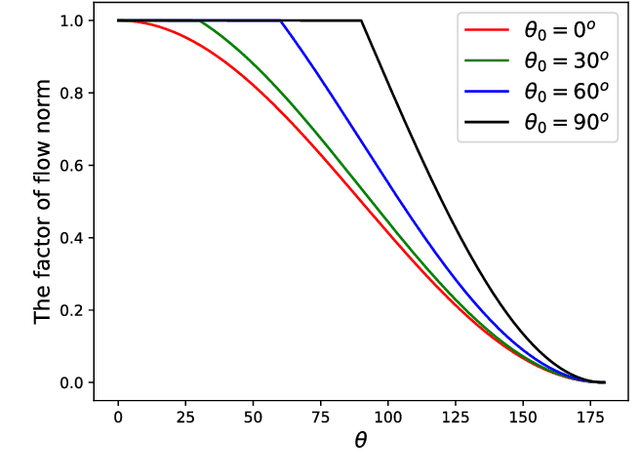
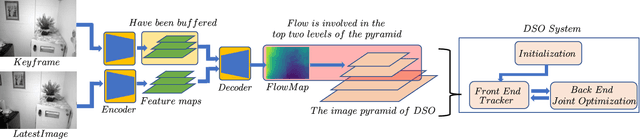
Many approaches have been proposed to estimate camera poses by directly minimizing photometric error. However, due to the non-convex property of direct alignment, proper initialization is still required for these methods. Many robust norms (e.g. Huber norm) have been proposed to deal with the outlier terms caused by incorrect initializations. These robust norms are solely defined on the magnitude of each error term. In this paper, we propose a novel robust norm, named FlowNorm, that exploits the information from both the local error term and the global image registration information. While the local information is defined on patch alignments, the global information is estimated using a learning-based network. Using both the local and global information, we achieve an unprecedented convergence range in which images can be aligned given large view angle changes or small overlaps. We further demonstrate the usability of the proposed robust norm by integrating it into the direct methods DSO and BA-Net, and generate more robust and accurate results in real-time.