 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScaled Autonomy: Enabling Human Operators to Control Robot Fleets
Paper and Code
Sep 22, 2019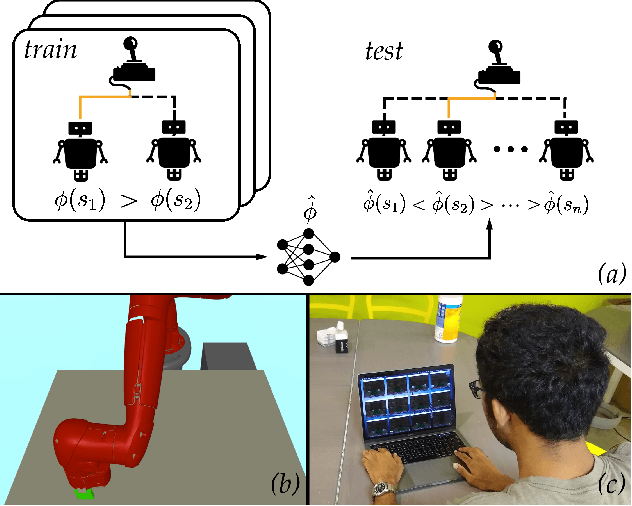
Autonomous robots often encounter challenging situations where their control policies fail and an expert human operator must briefly intervene, e.g., through teleoperation. In settings where multiple robots act in separate environments, a single human operator can manage a fleet of robots by identifying and teleoperating one robot at any given time. The key challenge is that users have limited attention: as the number of robots increases, users lose the ability to decide which robot requires teleoperation the most. Our goal is to automate this decision, thereby enabling users to supervise more robots than their attention would normally allow for. Our insight is that we can model the user's choice of which robot to control as an approximately optimal decision that maximizes the user's utility function. We learn a model of the user's preferences from observations of the user's choices in easy settings with a few robots, and use it in challenging settings with more robots to automatically identify which robot the user would most likely choose to control, if they were able to evaluate the states of all robots at all times. We run simulation experiments and a user study with twelve participants that show our method can be used to assist users in performing a navigation task and manipulator reaching task.