 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCascaded Gaussian Processes for Data-efficient Robot Dynamics Learning
Paper and Code
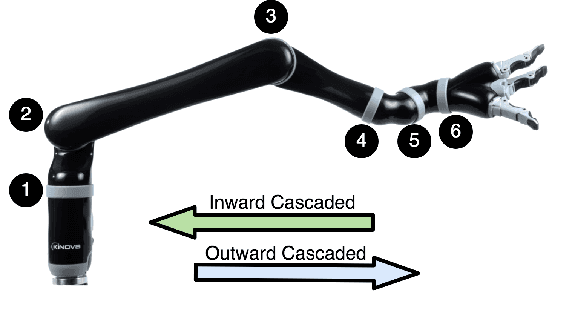
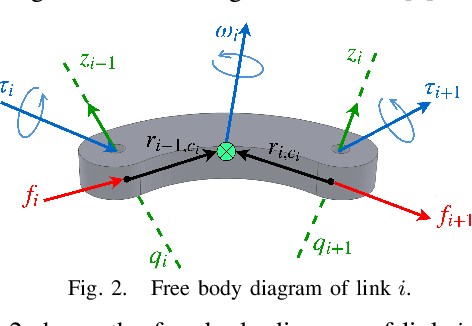
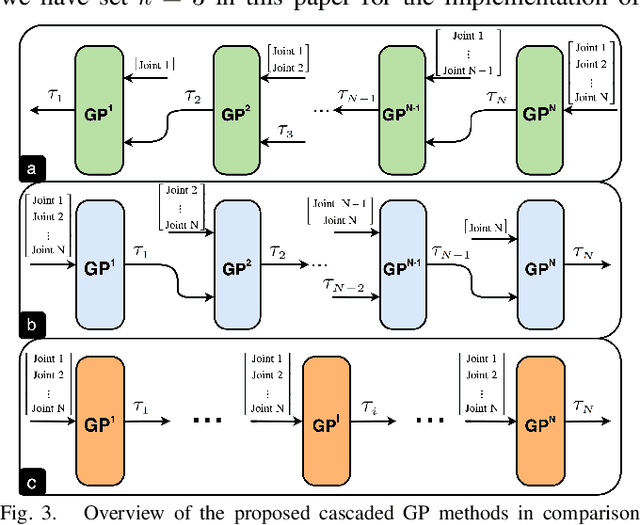
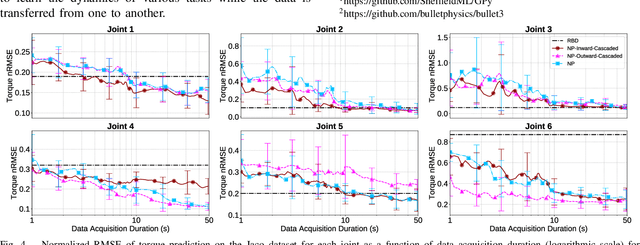
Motivated by the recursive Newton-Euler formulation, we propose a novel cascaded Gaussian process learning framework for the inverse dynamics of robot manipulators. This approach leads to a significant dimensionality reduction which in turn results in better learning and data efficiency. We explore two formulations for the cascading: the inward and outward, both along the manipulator chain topology. The learned modeling is tested in conjunction with the classical inverse dynamics model (semi-parametric) and on its own (non-parametric) in the context of feed-forward control of the arm. Experimental results are obtained with Jaco 2 six-DOF and SARCOS seven-DOF manipulators for randomly defined sinusoidal motions of the joints in order to evaluate the performance of cascading against the standard GP learning. In addition, experiments are conducted using Jaco 2 on a task emulating a pouring maneuver. Results indicate a consistent improvement in learning speed with the inward cascaded GP model and an overall improvement in data efficiency and generalization.