 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBio-Inspired Foveated Technique for Augmented-Range Vehicle Detection Using Deep Neural Networks
Paper and Code
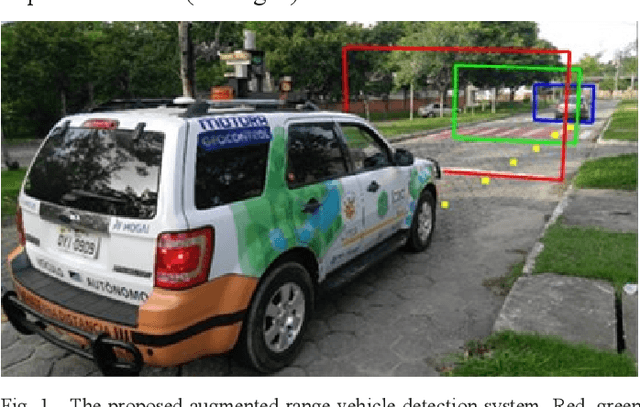
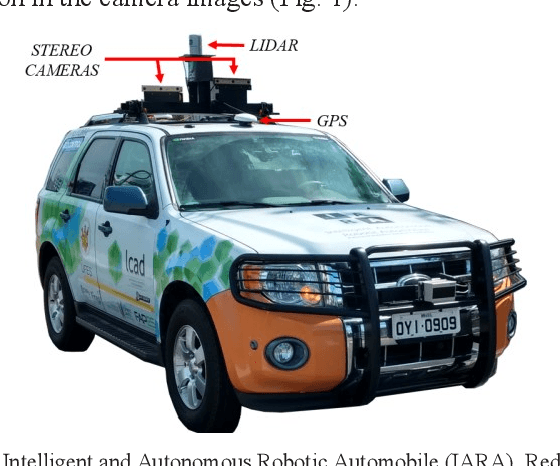
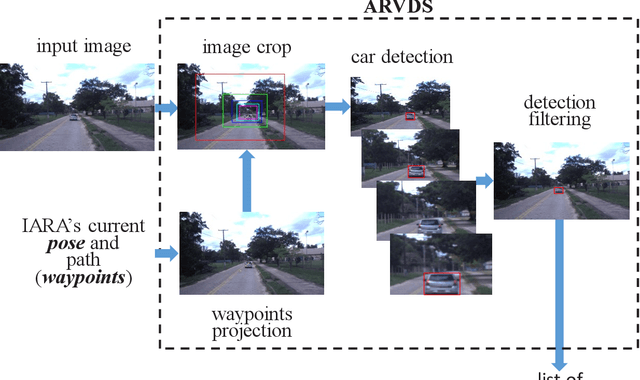
We propose a bio-inspired foveated technique to detect cars in a long range camera view using a deep convolutional neural network (DCNN) for the IARA self-driving car. The DCNN receives as input (i) an image, which is captured by a camera installed on IARA's roof; and (ii) crops of the image, which are centered in the waypoints computed by IARA's path planner and whose sizes increase with the distance from IARA. We employ an overlap filter to discard detections of the same car in different crops of the same image based on the percentage of overlap of detections' bounding boxes. We evaluated the performance of the proposed augmented-range vehicle detection system (ARVDS) using the hardware and software infrastructure available in the IARA self-driving car. Using IARA, we captured thousands of images of real traffic situations containing cars in a long range. Experimental results show that ARVDS increases the Average Precision (AP) of long range car detection from 29.51% (using a single whole image) to 63.15%.