Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan We Trust You? On Calibration of a Probabilistic Object Detector for Autonomous Driving
Paper and Code
Sep 26, 2019
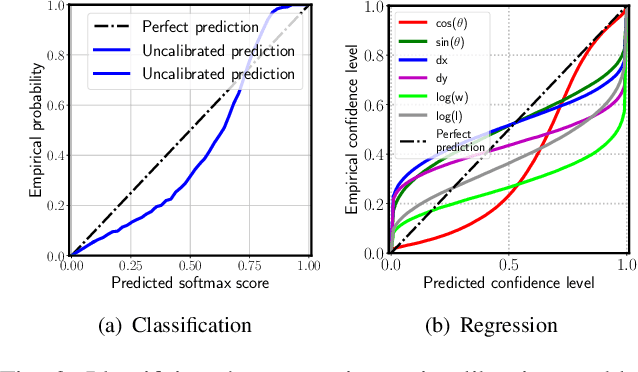
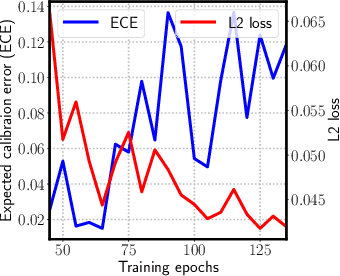
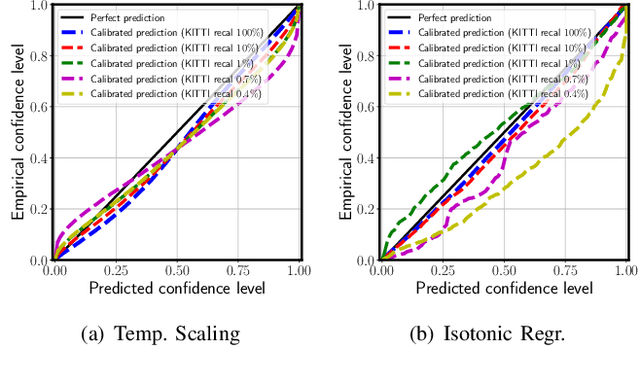
Reliable uncertainty estimation is crucial for perception systems in safe autonomous driving. Recently, many methods have been proposed to model uncertainties in deep learning based object detectors. However, the estimated probabilities are often uncalibrated, which may lead to severe problems in safety critical scenarios. In this work, we identify such uncertainty miscalibration problems in a probabilistic LiDAR 3D object detection network, and propose three practical methods to significantly reduce errors in uncertainty calibration. Extensive experiments on several datasets show that our methods produce well-calibrated uncertainties, and generalize well between different datasets.
* To appear in IROS 2019
View paper on