 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeController Synthesis for Multi-Agent Systems With Intermittent Communication: A Metric Temporal Logic Approach
Paper and Code
Sep 22, 2019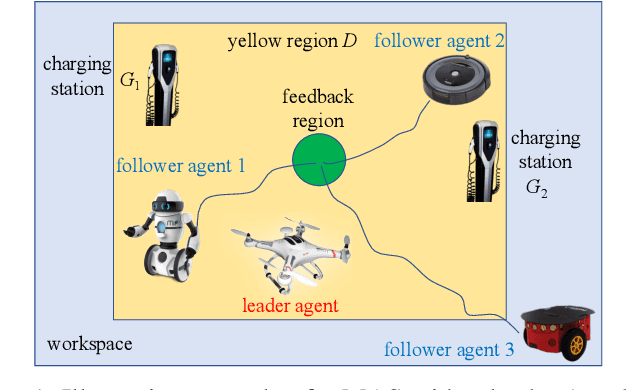
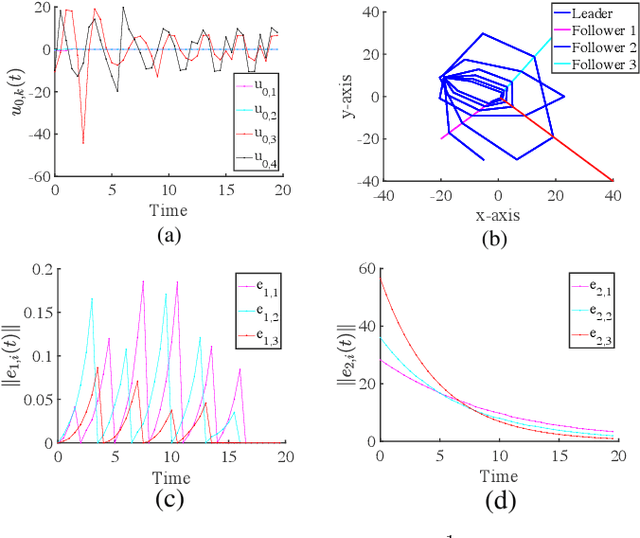
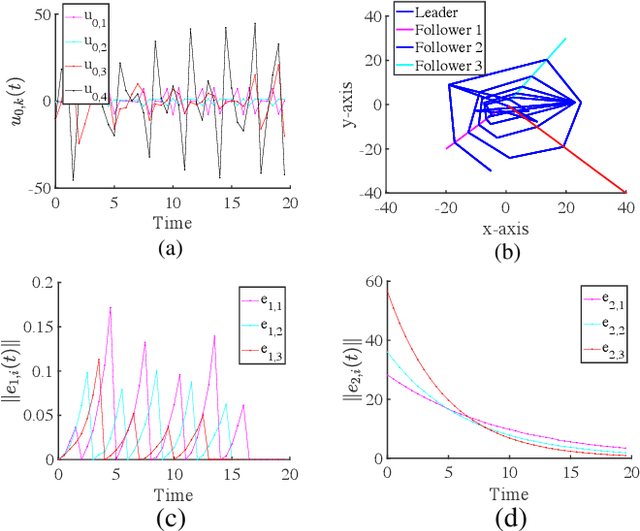
This paper develops a controller synthesis approach for a multi-agent system (MAS) with intermittent communication. We adopt a leader-follower scheme, where a mobile leader with absolute position sensors switches among a set of followers without absolute position sensors to provide each follower with intermittent state information.We model the MAS as a switched system. The followers are to asymptotically reach a predetermined consensus state. To guarantee the stability of the switched system and the consensus of the followers, we derive maximum and minimal dwell-time conditions to constrain the intervals between consecutive time instants at which the leader should provide state information to the same follower. Furthermore, the leader needs to satisfy practical constraints such as charging its battery and staying in specific regions of interest. Both the maximum and minimum dwell-time conditions and these practical constraints can be expressed by metric temporal logic (MTL) specifications. We iteratively compute the optimal control inputs such that the leader satisfies the MTL specifications, while guaranteeing stability and consensus of the followers. We implement the proposed method on a case study with three mobile robots as the followers and one quadrotor as the leader.