 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepGait: Planning and Control of Quadrupedal Gaits using Deep Reinforcement Learning
Paper and Code
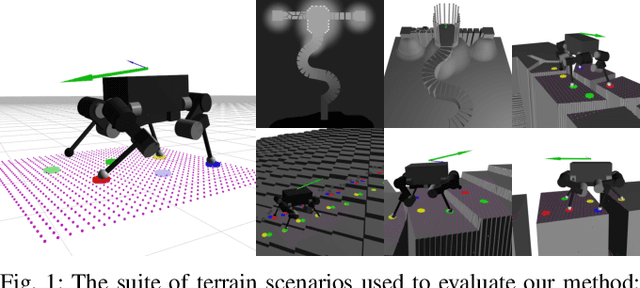
This paper addresses the problem of legged locomotion in non-flat terrain. As legged robots such as quadrupeds are to be deployed in terrains with geometries which are difficult to model and predict, the need arises to equip them with the capability to generalize well to unforeseen situations. In this work, we propose a novel technique for training neural-network policies for terrain-aware locomotion, which combines state-of-the-art methods for model-based motion planning and reinforcement learning. Our approach is centered on formulating Markov decision processes using the evaluation of dynamic feasibility criteria in place of physical simulation. We thus employ policy-gradient methods to independently train policies which respectively plan and execute foothold and base motions in 3D environments using both proprioceptive and exteroceptive measurements. We apply our method within a challenging suite of simulated terrain scenarios which contain features such as narrow bridges, gaps and stepping-stones, and train policies which succeed in locomoting effectively in all cases.