 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarial Feature Training for Generalizable Robotic Visuomotor Control
Paper and Code
Sep 17, 2019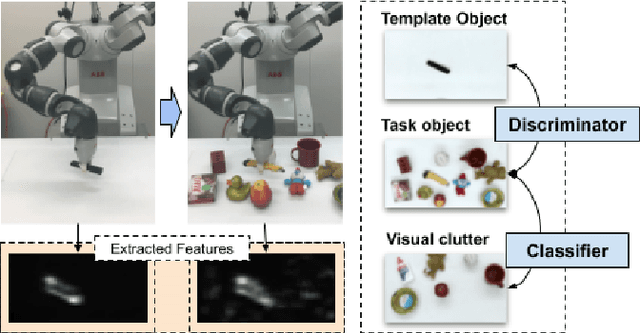


Deep reinforcement learning (RL) has enabled training action-selection policies, end-to-end, by learning a function which maps image pixels to action outputs. However, it's application to visuomotor robotic policy training has been limited because of the challenge of large-scale data collection when working with physical hardware. A suitable visuomotor policy should perform well not just for the task-setup it has been trained for, but also for all varieties of the task, including novel objects at different viewpoints surrounded by task-irrelevant objects. However, it is impractical for a robotic setup to sufficiently collect interactive samples in a RL framework to generalize well to novel aspects of a task. In this work, we demonstrate that by using adversarial training for domain transfer, it is possible to train visuomotor policies based on RL frameworks, and then transfer the acquired policy to other novel task domains. We propose to leverage the deep RL capabilities to learn complex visuomotor skills for uncomplicated task setups, and then exploit transfer learning to generalize to new task domains provided only still images of the task in the target domain. We evaluate our method on two real robotic tasks, picking and pouring, and compare it to a number of prior works, demonstrating its superiority.