 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCamera Pose Correction in SLAM Based on Bias Values of Map Points
Paper and Code
Aug 24, 2019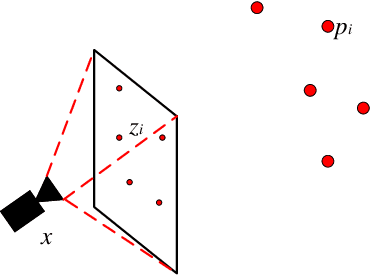
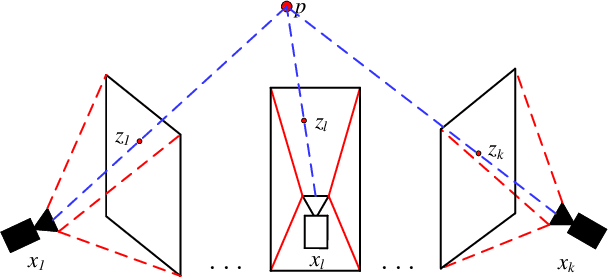
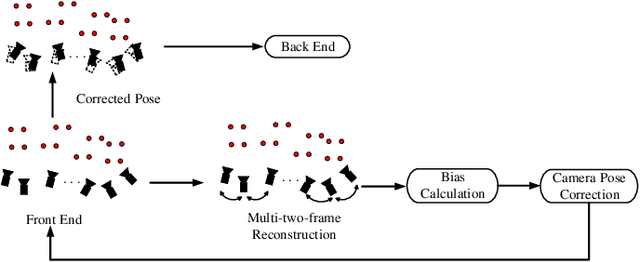
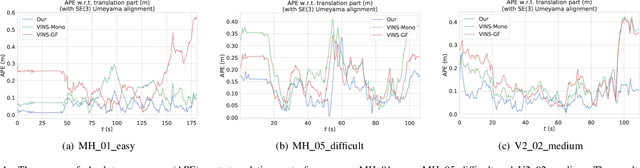
Accurate camera pose estimation result is essential for visual SLAM (VSLAM). This paper presents a novel pose correction method to improve the accuracy of the VSLAM system. Firstly, the relationship between the camera pose estimation error and bias values of map points is derived based on the optimized function in VSLAM. Secondly, the bias value of the map point is calculated by a statistical method. Finally, the camera pose estimation error is compensated according to the first derived relationship. After the pose correction, procedures of the original system, such as the bundle adjustment (BA) optimization, can be executed as before. Compared with existing methods, our algorithm is compact and effective and can be easily generalized to different VSLAM systems. Additionally, the robustness to system noise of our method is better than feature selection methods, due to all original system information is preserved in our algorithm while only a subset is employed in the latter. Experimental results on benchmark datasets show that our approach leads to considerable improvements over state-of-the-art algorithms for absolute pose estimation.