 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnforcing geometric constraints of virtual normal for depth prediction
Paper and Code
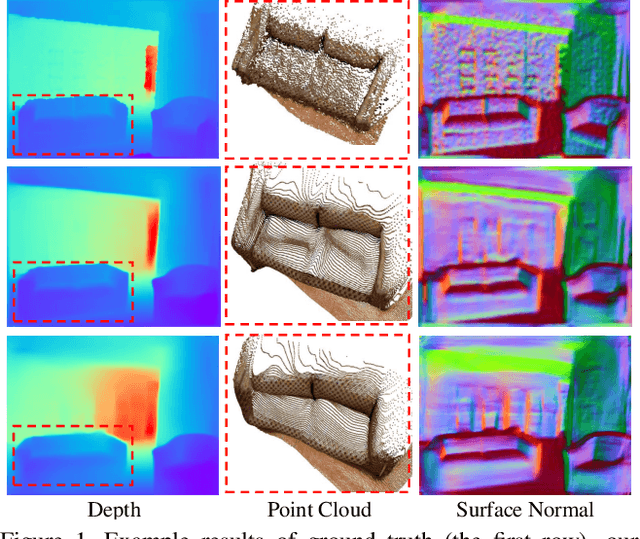
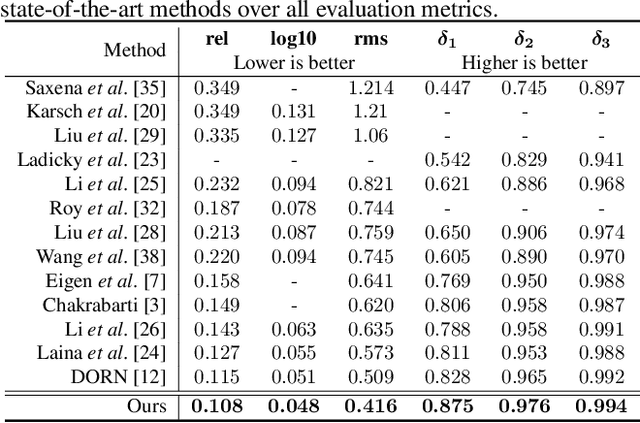
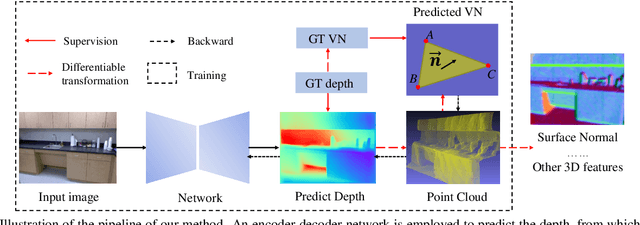
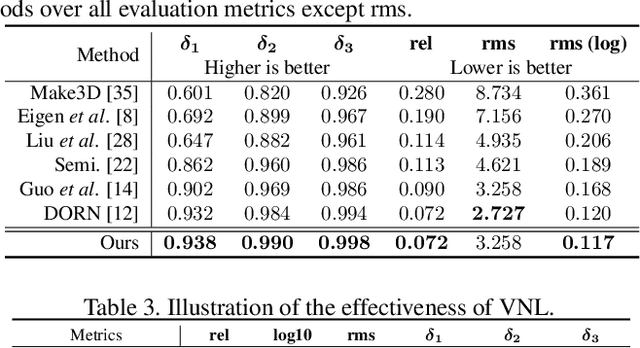
Monocular depth prediction plays a crucial role in understanding 3D scene geometry. Although recent methods have achieved impressive progress in evaluation metrics such as the pixel-wise relative error, most methods neglect the geometric constraints in the 3D space. In this work, we show the importance of the high-order 3D geometric constraints for depth prediction. By designing a loss term that enforces one simple type of geometric constraints, namely, virtual normal directions determined by randomly sampled three points in the reconstructed 3D space, we can considerably improve the depth prediction accuracy. Significantly, the byproduct of this predicted depth being sufficiently accurate is that we are now able to recover good 3D structures of the scene such as the point cloud and surface normal directly from the depth, eliminating the necessity of training new sub-models as was previously done. Experiments on two benchmarks: NYU Depth-V2 and KITTI demonstrate the effectiveness of our method and state-of-the-art performance.