 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpretable Modelling of Driving Behaviors in Interactive Driving Scenarios based on Cumulative Prospect Theory
Paper and Code
Jul 19, 2019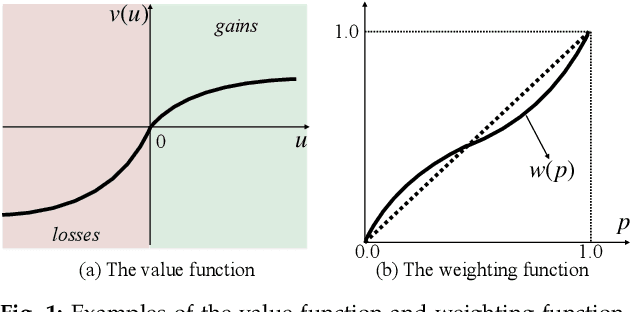
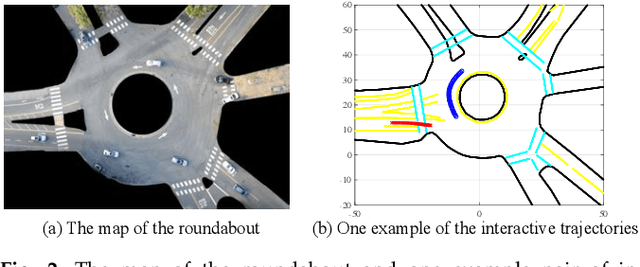
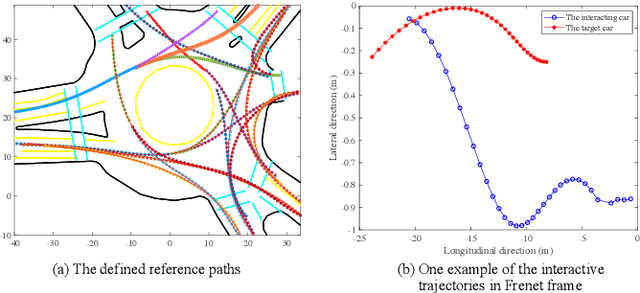
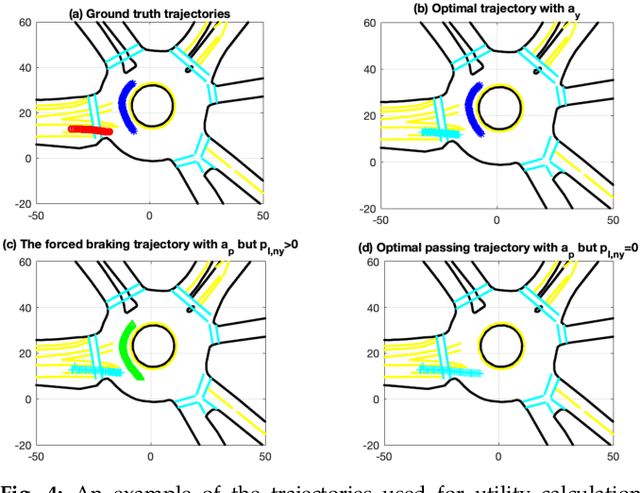
Understanding human driving behavior is important for autonomous vehicles. In this paper, we propose an interpretable human behavior model in interactive driving scenarios based on the cumulative prospect theory (CPT). As a non-expected utility theory, CPT can well explain some systematically biased or ``irrational'' behavior/decisions of human that cannot be explained by the expected utility theory. Hence, the goal of this work is to formulate the human drivers' behavior generation model with CPT so that some ``irrational'' behavior or decisions of human can be better captured and predicted. Towards such a goal, we first develop a CPT-driven decision-making model focusing on driving scenarios with two interacting agents. A hierarchical learning algorithm is proposed afterward to learn the utility function, the value function, and the decision weighting function in the CPT model. A case study for roundabout merging is also provided as verification. With real driving data, the prediction performances of three different models are compared: a predefined model based on time-to-collision (TTC), a learning-based model based on neural networks, and the proposed CPT-based model. The results show that the proposed model outperforms the TTC model and achieves similar performance as the learning-based model with much less training data and better interpretability.