 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussian Mixture Marginal Distributions for Modelling Remaining Pipe Wall Thickness of Critical Water Mains in Non-Destructive Evaluation
Paper and Code
Jul 02, 2019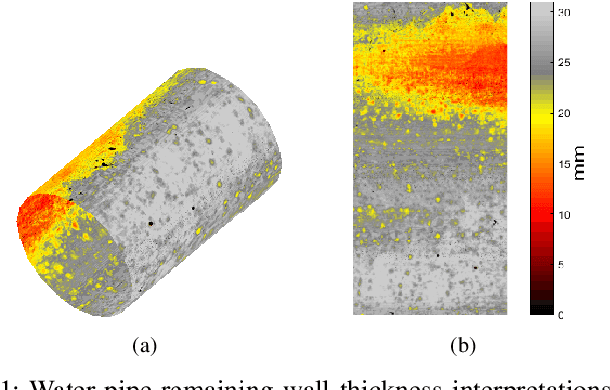
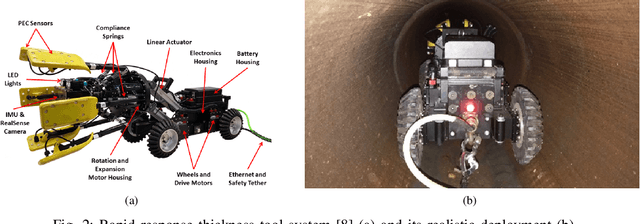
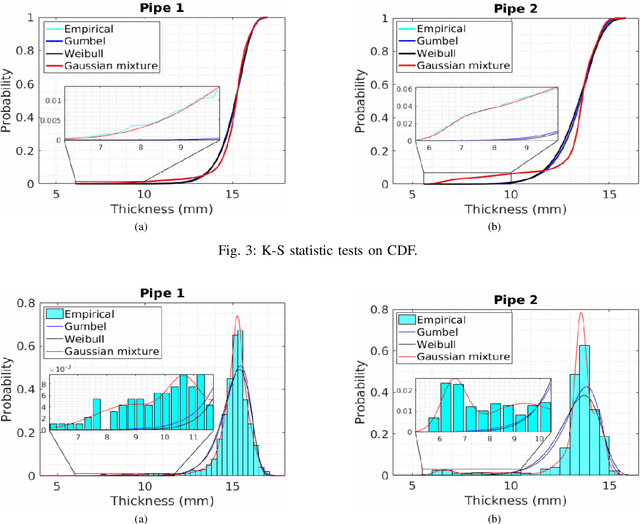
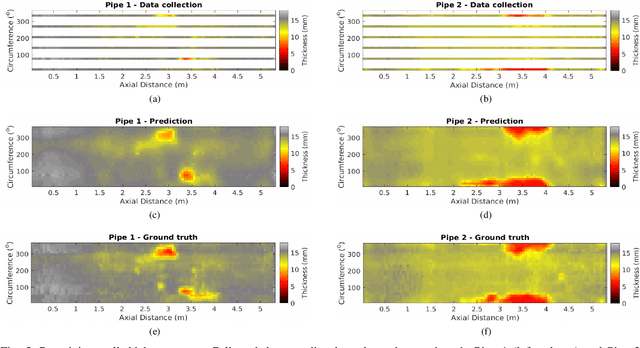
Rapidly estimating the remaining wall thickness (RWT) is paramount for the non-destructive condition assessment evaluation of large critical metallic pipelines. A robotic vehicle with embedded magnetism-based sensors has been developed to traverse the inside of a pipeline and conduct inspections at the location of a break. However its sensing speed is constrained by the magnetic principle of operation, thus slowing down the overall operation in seeking dense RWT mapping. To ameliorate this drawback, this work proposes the partial scanning of the pipe and then employing Gaussian Processes (GPs) to infer RWT at the unseen pipe sections. Since GP prediction assumes to have normally distributed input data - which does correspond with real RWT measurements - Gaussian mixture (GM) models are proven in this work as fitting marginal distributions to effectively capture the probability of any RWT value in the inspected data. The effectiveness of the proposed approach is extensively validated from real-world data collected in collaboration with a water utility from a cast iron water main pipeline in Sydney, Australia.