 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTraffic Light Recognition Using Deep Learning and Prior Maps for Autonomous Cars
Paper and Code
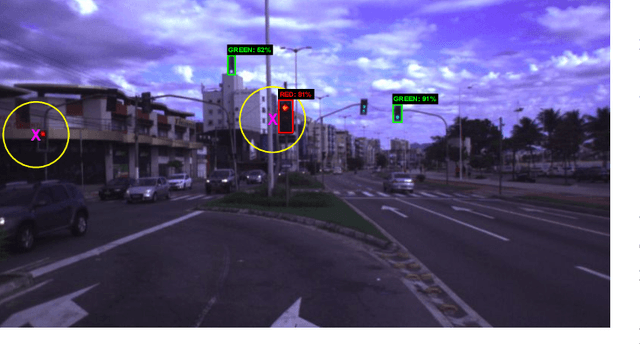
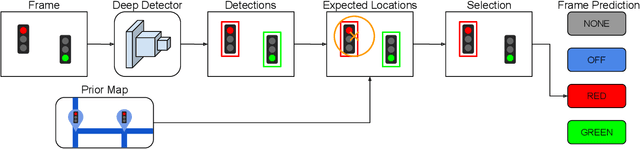

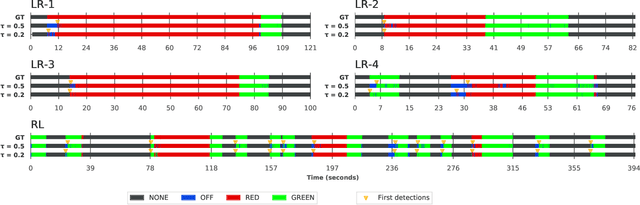
Autonomous terrestrial vehicles must be capable of perceiving traffic lights and recognizing their current states to share the streets with human drivers. Most of the time, human drivers can easily identify the relevant traffic lights. To deal with this issue, a common solution for autonomous cars is to integrate recognition with prior maps. However, additional solution is required for the detection and recognition of the traffic light. Deep learning techniques have showed great performance and power of generalization including traffic related problems. Motivated by the advances in deep learning, some recent works leveraged some state-of-the-art deep detectors to locate (and further recognize) traffic lights from 2D camera images. However, none of them combine the power of the deep learning-based detectors with prior maps to recognize the state of the relevant traffic lights. Based on that, this work proposes to integrate the power of deep learning-based detection with the prior maps used by our car platform IARA (acronym for Intelligent Autonomous Robotic Automobile) to recognize the relevant traffic lights of predefined routes. The process is divided in two phases: an offline phase for map construction and traffic lights annotation; and an online phase for traffic light recognition and identification of the relevant ones. The proposed system was evaluated on five test cases (routes) in the city of Vit\'oria, each case being composed of a video sequence and a prior map with the relevant traffic lights for the route. Results showed that the proposed technique is able to correctly identify the relevant traffic light along the trajectory.