 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePixel-Accurate Depth Evaluation in Realistic Driving Scenarios
Paper and Code
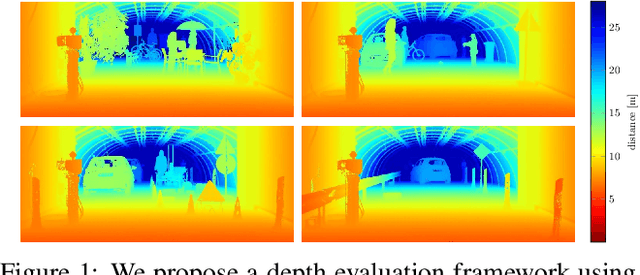
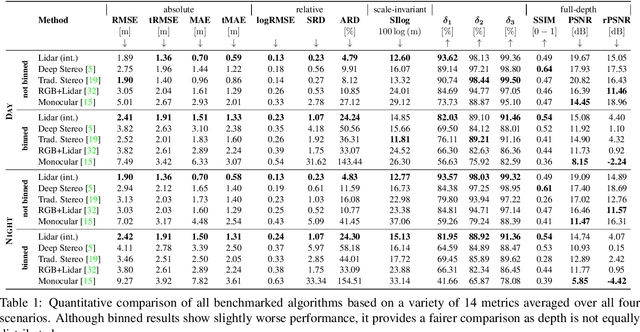
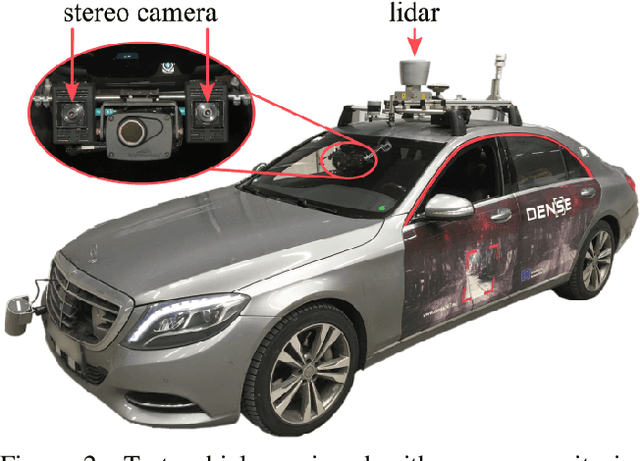
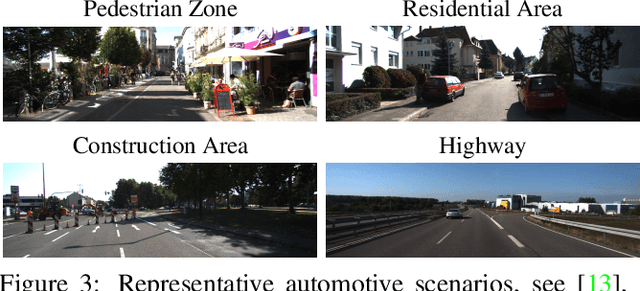
This work presents an evaluation benchmark for depth estimation and completion using high-resolution depth measurements with angular resolution of up to 25" (arcsecond), akin to a 50 megapixel camera with per-pixel depth available. Existing datasets, such as the KITTI benchmark, provide only sparse reference measurements with an order of magnitude lower angular resolution - these sparse measurements are treated as ground truth by existing depth estimation methods. We propose an evaluation in four characteristic automotive scenarios recorded in varying weather conditions (day, night, fog, rain). As a result, our benchmark allows to evaluate the robustness of depth sensing methods to adverse weather and different driving conditions. Using the proposed evaluation data, we show that current stereo approaches provide significantly more stable depth estimates than monocular methods and lidar completion in adverse weather.