 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and integration of a parallel, soft robotic end-effector for extracorporeal ultrasound
Paper and Code
Jun 11, 2019
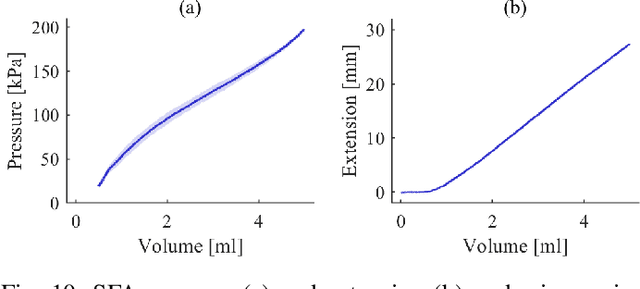
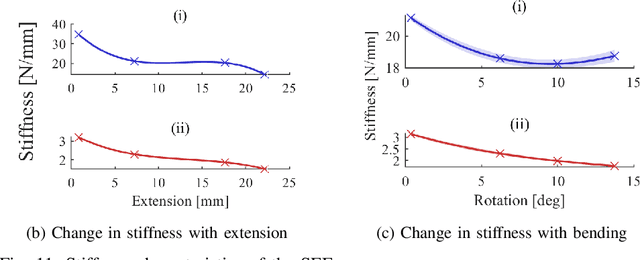
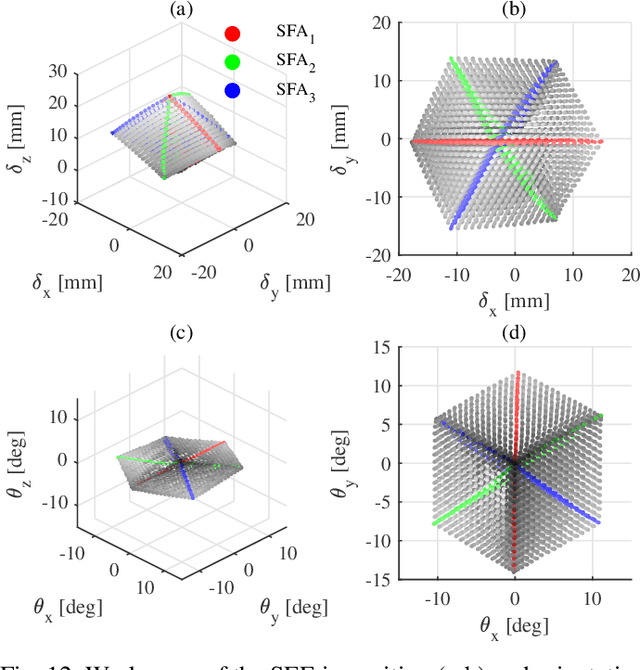
In this work we address limitations in state-of-the-art ultrasound robots by designing and integrating the first soft robotic system for ultrasound imaging. It makes use of the inherent qualities of soft robotics technologies to establish a safe, adaptable interaction between ultrasound probe and patient. We acquire clinical data to establish the movement ranges and force levels required in prenatal foetal ultrasound imaging and design our system accordingly. The end-effector's stiffness characteristics allow for it to reach the desired workspace while maintaining a stable contact between ultrasound probe and patient under the determined loads. The system exhibits a high degree of safety due to its inherent compliance in the transversal direction. We verify the mechanical characteristics of the end-effector, derive and validate a kinetostatic model and demonstrate the robot's controllability with and without external loading. The imaging capabilities of the robot are shown in a tele-operated setting on a foetal phantom. The design exhibits the desired stiffness characteristics with a high stiffness along the ultrasound transducer and a high compliance in lateral direction. Twist is constrained using a braided mesh reinforcement. The model can accurately predict the end-effector pose with a mean error of about 6% in position 7% in orientation. The derived controller is, with an average position error of 0.39mm able to track a target pose efficiently without and with externally applied loads. Finally, the images acquired with the system are of equally good quality compared to a manual sonographer scan.