 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl of A High Performance Bipedal Robot using Viscoelastic Liquid Cooled Actuators
Paper and Code
Jun 10, 2019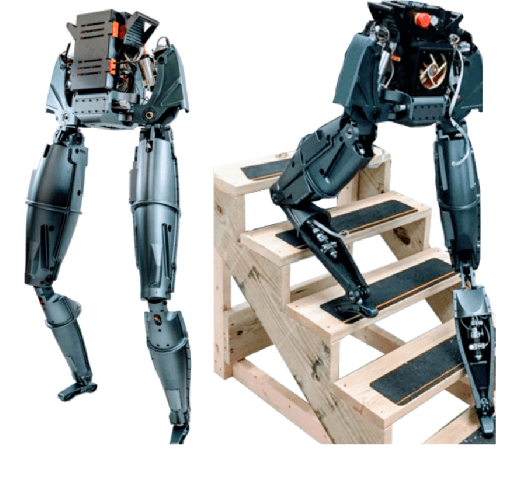
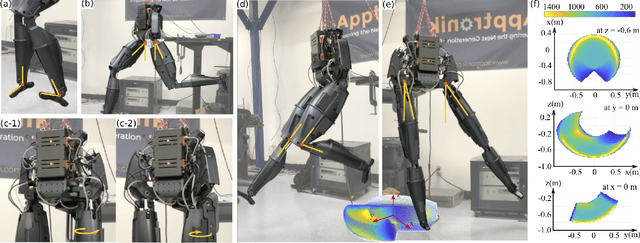
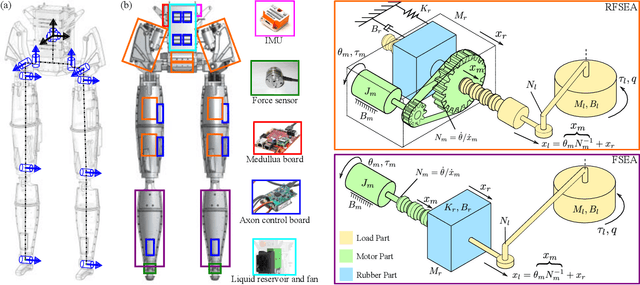
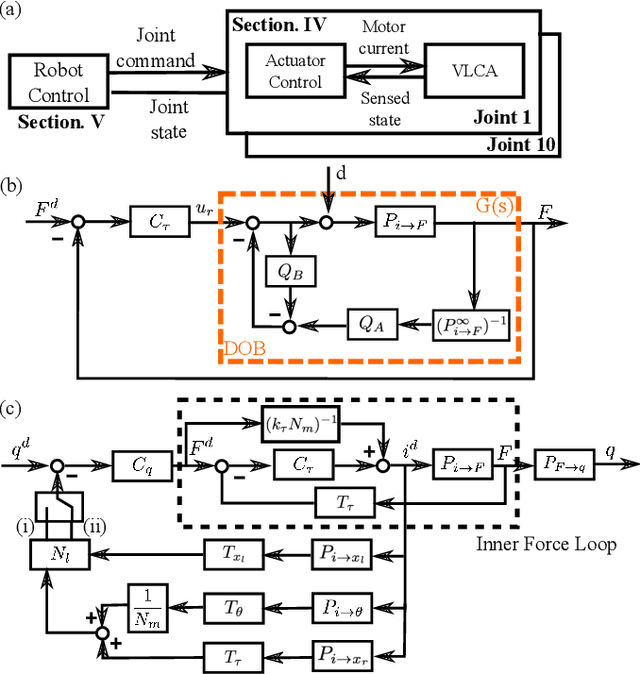
This paper describes the control, and evaluation of a new human-scaled biped robot with liquid cooled viscoelastic actuators (VLCA). Based on the lessons learned from previous work from our team on VLCA [1], we present a new system design embodying a Reaction Force Sensing Series Elastic Actuator (RFSEA) and a Force Sensing Series Elastic Actuator (FSEA). These designs are aimed at reducing the size and weight of the robot's actuation system while inheriting the advantages of our designs such as energy efficiency, torque density, impact resistance and position/force controllability. The system design takes into consideration human-inspired kinematics and range-of-motion (ROM), while relying on foot placement to balance. In terms of actuator control, we perform a stability analysis on a Disturbance Observer (DOB) designed for force control. We then evaluate various position control algorithms both in the time and frequency domains for our VLCA actuators. Having the low level baseline established, we first perform a controller evaluation on the legs using Operational Space Control (OSC) [2]. Finally, we move on to evaluating the full bipedal robot by accomplishing unsupported dynamic walking by means of the algorithms to appear in [3].