 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIN2LAAMA: INertial Lidar Localisation Autocalibration And MApping
Paper and Code

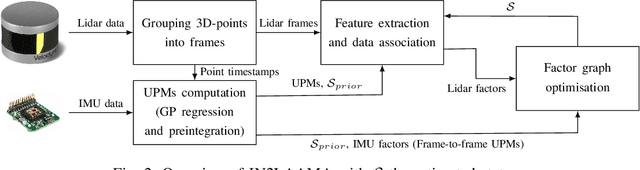
In this paper, we present INertial Lidar Localisation Autocalibration And MApping (IN2LAAMA): a probabilistic framework for localisation, mapping, and extrinsic calibration based on a 3D-lidar and a 6-DoF-IMU. Most of today's lidars collect geometric information about the surrounding environment by sweeping lasers across their field of view. Consequently, 3D-points in one lidar scan are acquired at different timestamps. If the sensor trajectory is not accurately known, the scans are affected by the phenomenon known as motion distortion. The proposed method leverages preintegration with a continuous representation of the inertial measurements to characterise the system's motion at any point in time. It enables precise correction of the motion distortion without relying on any explicit motion model. The system's pose, velocity, biases, and time-shift are estimated via a full batch optimisation that includes automatically generated loop-closure constraints. The autcalibration and the registration of lidar data relies on planar and edge features matched across pairs of scans. The performance of the framework is validated through simulated and real-data experiments.