 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthesis of Provably Correct Autonomy Protocols for Shared Control
Paper and Code
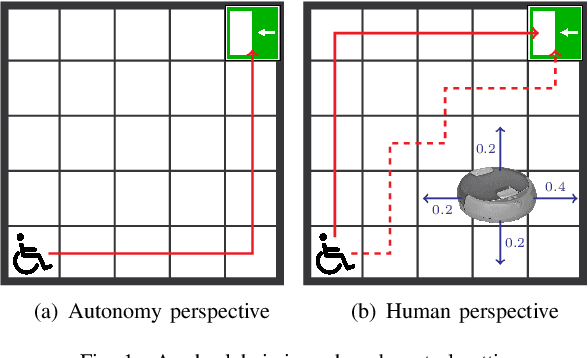
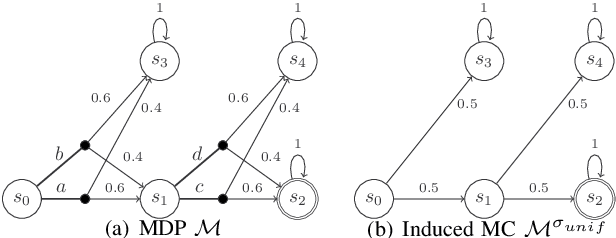
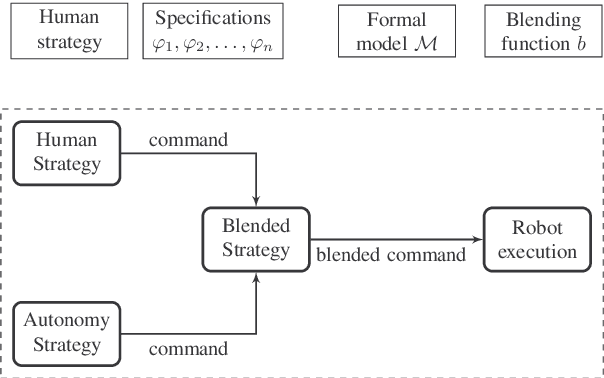
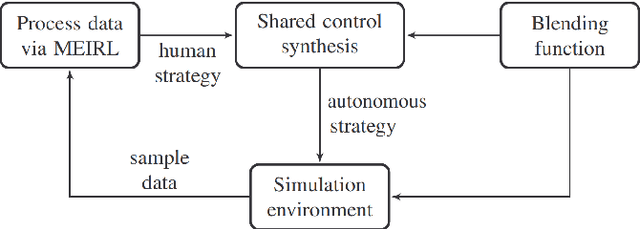
We synthesize shared control protocols subject to probabilistic temporal logic specifications. More specifically, we develop a framework in which a human and an autonomy protocol can issue commands to carry out a certain task. We blend these commands into a joint input to a robot. We model the interaction between the human and the robot as a Markov decision process (MDP) that represents the shared control scenario. Using inverse reinforcement learning, we obtain an abstraction of the human's behavior and decisions. We use randomized strategies to account for randomness in human's decisions, caused by factors such as complexity of the task specifications or imperfect interfaces. We design the autonomy protocol to ensure that the resulting robot behavior satisfies given safety and performance specifications in probabilistic temporal logic. Additionally, the resulting strategies generate behavior as similar to the behavior induced by the human's commands as possible. We solve the underlying problem efficiently using quasiconvex programming. Case studies involving autonomous wheelchair navigation and unmanned aerial vehicle mission planning showcase the applicability of our approach.