 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConditional Generative Neural System for Probabilistic Trajectory Prediction
Paper and Code
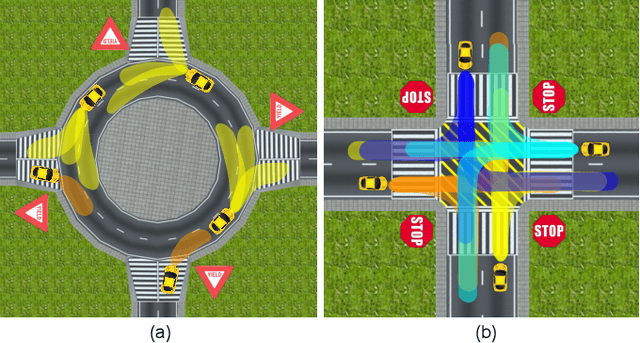
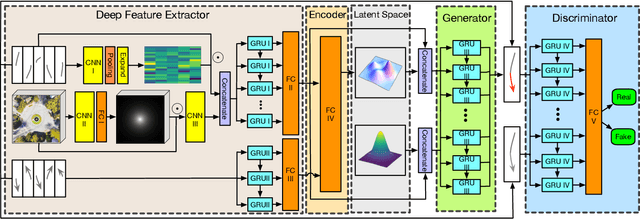
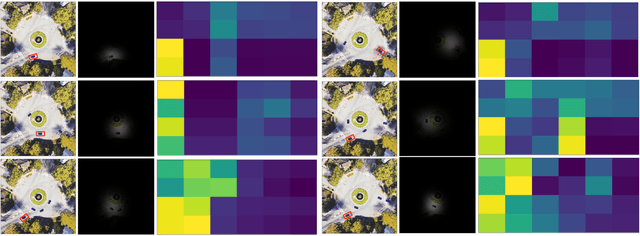
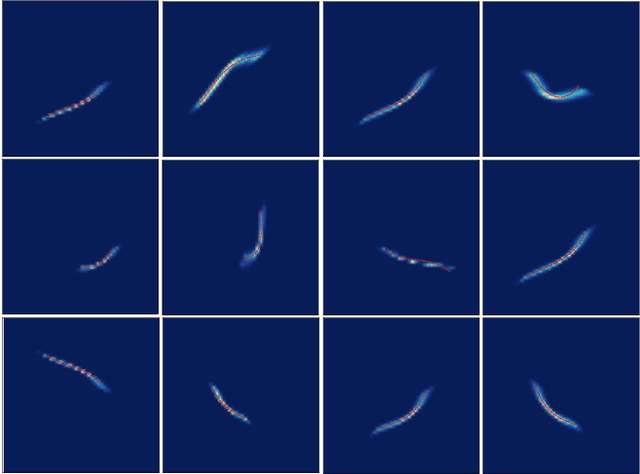
Effective understanding of the environment and accurate trajectory prediction of surrounding dynamic obstacles are critical for intelligent systems such as autonomous vehicles and wheeled mobile robotics navigating in complex scenarios to achieve safe and high-quality decision making, motion planning and control. Due to the uncertain nature of the future, it is desired to make inference from a probability perspective instead of deterministic prediction. In this paper, we propose a conditional generative neural system (CGNS) for probabilistic trajectory prediction to approximate the data distribution, with which realistic, feasible and diverse future trajectory hypotheses can be sampled. The system combines the strengths of conditional latent space learning and variational divergence minimization, and leverages both static context and interaction information with soft attention mechanisms. We also propose a regularization method for incorporating soft constraints into deep neural networks with differentiable barrier functions, which can regulate and push the generated samples into the feasible regions. The proposed system is evaluated on several public benchmark datasets for pedestrian trajectory prediction and a roundabout naturalistic driving dataset collected by ourselves. The experiment results demonstrate that our model achieves better performance than various baseline approaches in terms of prediction accuracy.