 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Environment Prediction in Urban Scenes using Recurrent Representation Learning
Paper and Code
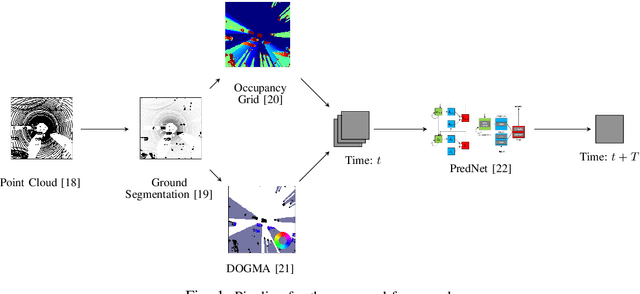

A key challenge for autonomous driving is safe trajectory planning in cluttered, urban environments with dynamic obstacles, such as pedestrians, bicyclists, and other vehicles. A reliable prediction of the future environment state, including the behavior of dynamic agents, would allow planning algorithms to proactively generate a trajectory in response to a rapidly changing environment. We present a novel framework that predicts the future occupancy state of the local environment surrounding an autonomous agent by learning a motion model from occupancy grid data using a neural network. We take advantage of the temporal structure of the grid data by utilizing a convolutional long-short term memory network in the form of the PredNet architecture. This method is validated on the KITTI dataset and demonstrates higher accuracy and better predictive power than baseline methods.