 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAre State-of-the-art Visual Place Recognition Techniques any Good for Aerial Robotics?
Paper and Code
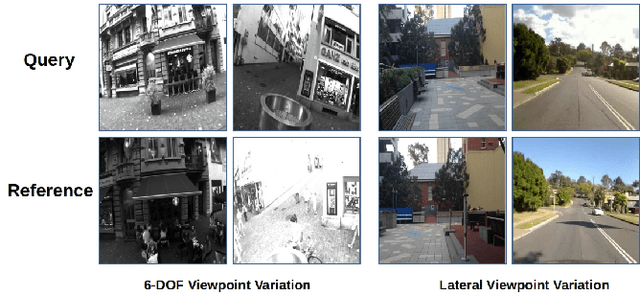



Visual Place Recognition (VPR) has seen significant advances at the frontiers of matching performance and computational superiority over the past few years. However, these evaluations are performed for ground-based mobile platforms and cannot be generalized to aerial platforms. The degree of viewpoint variation experienced by aerial robots is complex, with their processing power and on-board memory limited by payload size and battery ratings. Therefore, in this paper, we collect $8$ state-of-the-art VPR techniques that have been previously evaluated for ground-based platforms and compare them on $2$ recently proposed aerial place recognition datasets with three prime focuses: a) Matching performance b) Processing power consumption c) Projected memory requirements. This gives a birds-eye view of the applicability of contemporary VPR research to aerial robotics and lays down the the nature of challenges for aerial-VPR.