 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-organized Collective Motion with a Simulated Real Robot Swarm
Paper and Code
Apr 05, 2019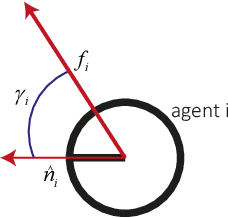
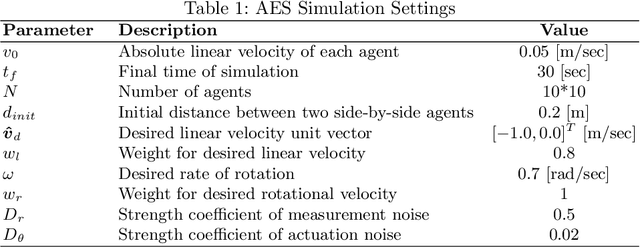
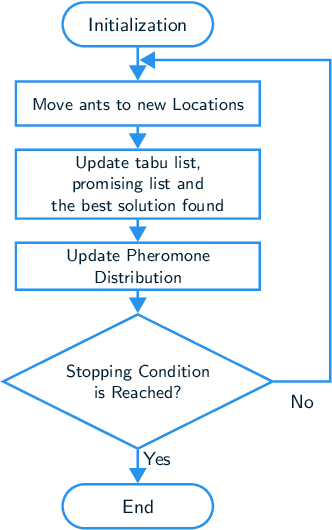
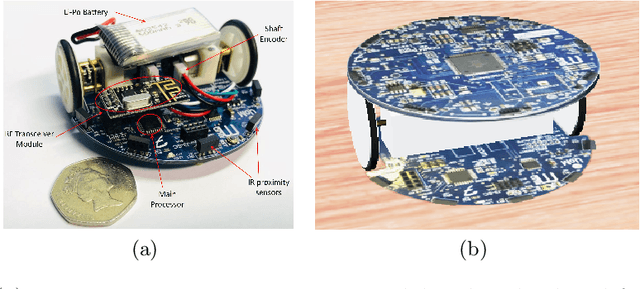
Collective motion is one of the most fascinating phenomena observed in the nature. In the last decade, it aroused so much attention in physics, control and robotics fields. In particular, many studies have been done in swarm robotics related to collective motion, also called flocking. In most of these studies, robots use orientation and proximity of their neighbors to achieve collective motion. In such an approach, one of the biggest problems is to measure orientation information using on-board sensors. In most of the studies, this information is either simulated or implemented using communication. In this paper, to the best of our knowledge, we implemented a fully autonomous coordinated motion without alignment using very simple Mona robots. We used an approach based on Active Elastic Sheet (AES) method. We modified the method and added the capability to enable the swarm to move toward a desired direction and rotate about an arbitrary point. The parameters of the modified method are optimized using TCACS optimization algorithm. We tested our approach in different settings using Matlab and Webots.