 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLane Change Decision-making through Deep Reinforcement Learning with Rule-based Constraints
Paper and Code

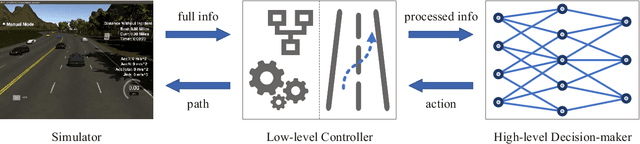

Autonomous driving decision-making is a great challenge due to the complexity and uncertainty of the traffic environment. Combined with the rule-based constraints, a Deep Q-Network (DQN) based method is applied for autonomous driving lane change decision-making task in this study. Through the combination of high-level lateral decision-making and low-level rule-based trajectory modification, a safe and efficient lane change behavior can be achieved. With the setting of our state representation and reward function, the trained agent is able to take appropriate actions in a real-world-like simulator. The generated policy is evaluated on the simulator for 10 times, and the results demonstrate that the proposed rule-based DQN method outperforms the rule-based approach and the DQN method.