 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStitching Videos from a Fisheye Lens Camera and a Wide-Angle Lens Camera for Telepresence Robots
Paper and Code
Mar 15, 2019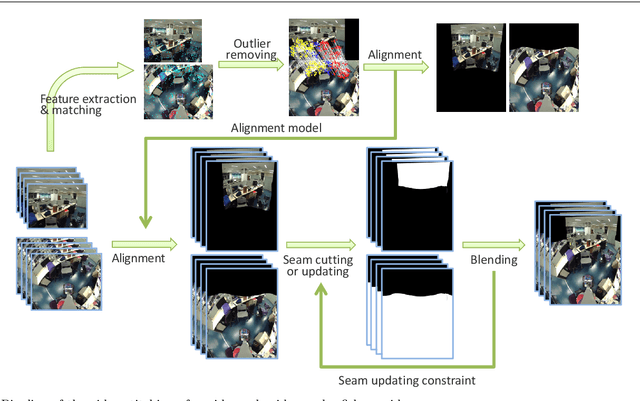
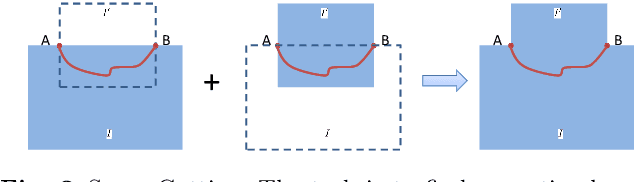
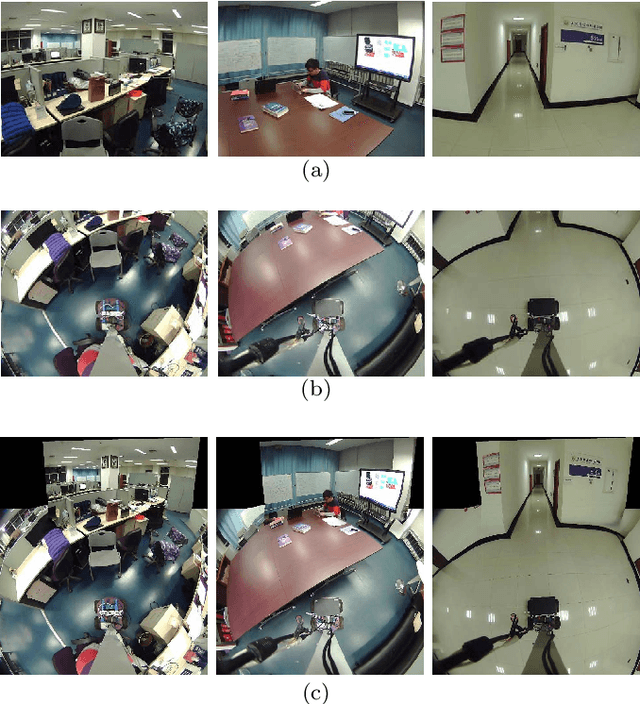
Many telepresence robots are equipped with a forward-facing camera for video communication and a downward-facing camera for navigation. In this paper, we propose to stitch videos from the FF-camera with a wide-angle lens and the DF-camera with a fisheye lens for telepresence robots. We aim at providing more compact and efficient visual feedback for the user interface of telepresence robots with user-friendly interactive experiences. To this end, we present a multi-homography-based video stitching method which stitches videos from a wide-angle camera and a fisheye camera. The method consists of video image alignment, seam cutting, and image blending. We directly align the wide-angle video image and the fisheye video image based on the multi-homography alignment without calibration, distortion correction, and unwarping procedures. Thus, we can obtain a stitched video with shape preservation in the non-overlapping regions and alignment in the overlapping area for telepresence. To alleviate ghosting effects caused by moving objects and/or moving cameras during telepresence robot driving, an optimal seam is found for aligned video composition, and the optimal seam will be updated in subsequent frames, considering spatial and temporal coherence. The final stitched video is created by image blending based on the optimal seam. We conducted a user study to demonstrate the effectiveness of our method and the superiority of telepresence robots with a stitched video as visual feedback.