 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Process Fusion: Visual Place Recognition Using Multiple Image Processing Methods
Paper and Code
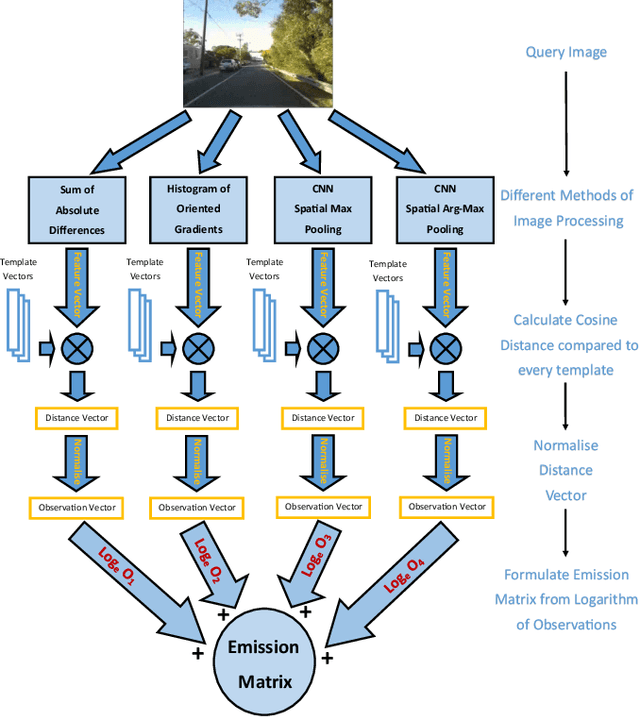
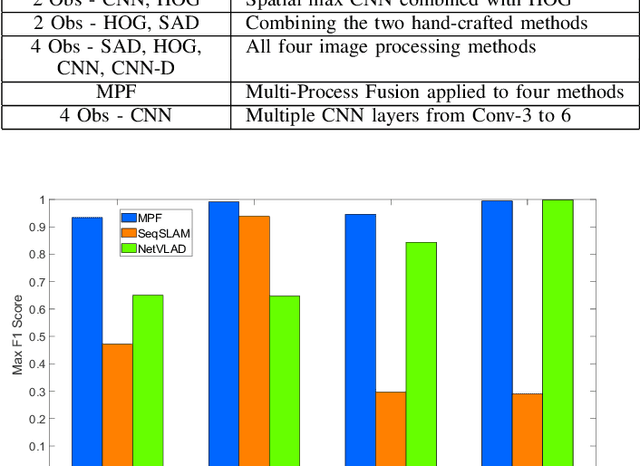
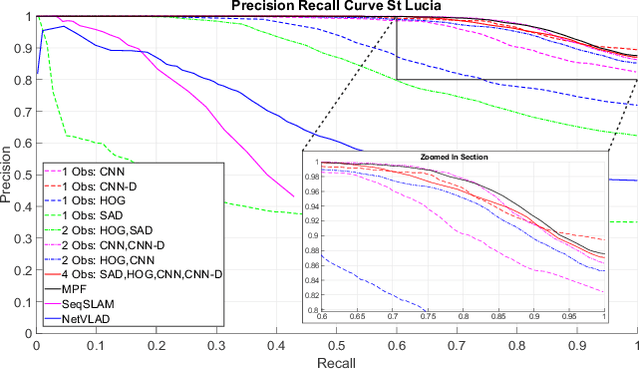
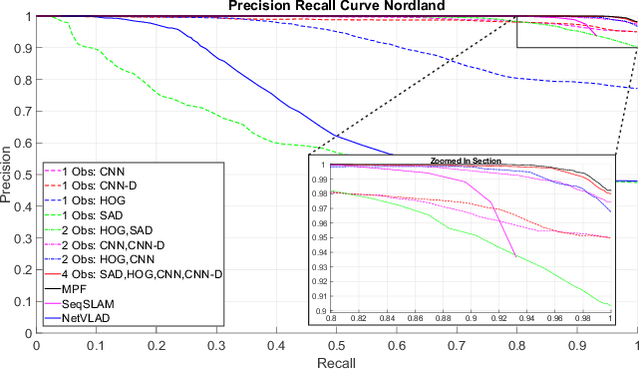
Typical attempts to improve the capability of visual place recognition techniques include the use of multi-sensor fusion and integration of information over time from image sequences. These approaches can improve performance but have disadvantages including the need for multiple physical sensors and calibration processes, both for multiple sensors and for tuning the image matching sequence length. In this paper we address these shortcomings with a novel "multi-sensor" fusion approach applied to multiple image processing methods for a single visual image stream, combined with a dynamic sequence matching length technique and an automatic processing method weighting scheme. In contrast to conventional single method approaches, our approach reduces the performance requirements of a single image processing methodology, instead requiring that within the suite of image processing methods, at least one performs well in any particular environment. In comparison to static sequence length techniques, the dynamic sequence matching technique enables reduced localization latencies through analysis of recognition quality metrics when re-entering familiar locations. We evaluate our approach on multiple challenging benchmark datasets, achieving superior performance to two state-of-the-art visual place recognition systems across environmental changes including winter to summer, afternoon to morning and night to day. Across the four benchmark datasets our proposed approach achieves an average F1 score of 0.96, compared to 0.78 for NetVLAD and 0.49 for SeqSLAM. We provide source code for the multi-fusion method and present analysis explaining how superior performance is achieved despite the multiple, disparate, image processing methods all being applied to a single source of imagery, rather than to multiple separate sensors.