 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComplex Stiffness Model of Physical Human-Robot Interaction: Implications for Control of Performance Augmentation Exoskeletons
Paper and Code
Mar 06, 2019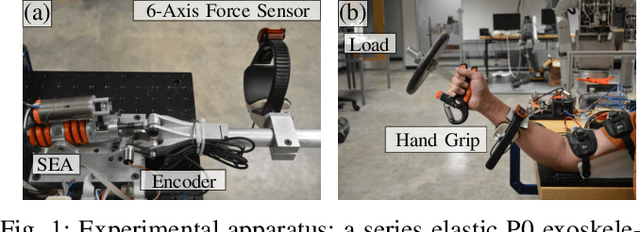
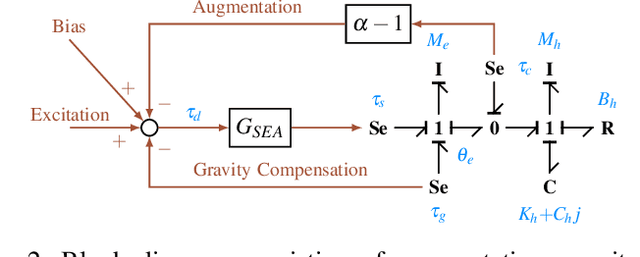
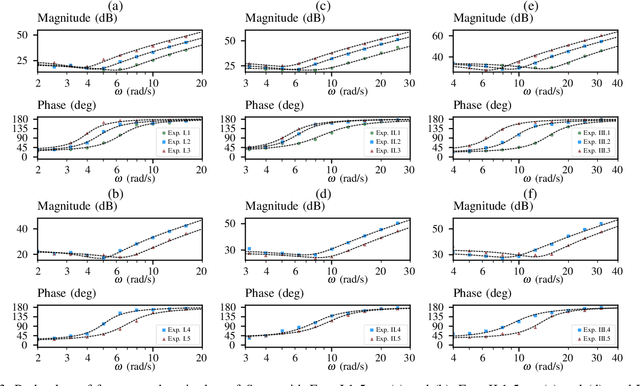
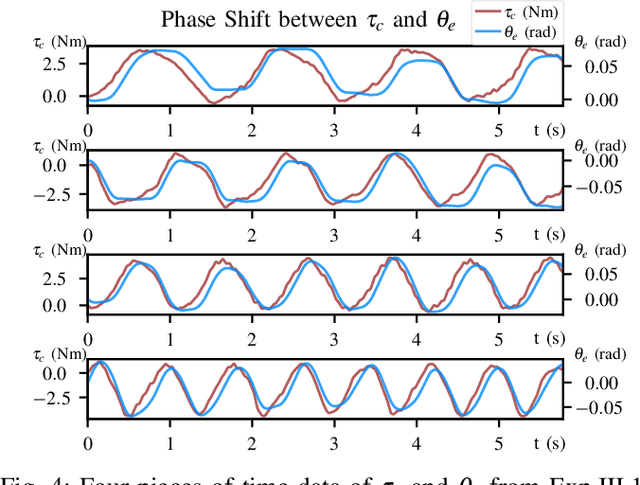
Human joint dynamic stiffness plays an important role in the stability of performance augmentation exoskeletons. In this paper, we consider a new frequency domain model of the human joint dynamics which features a complex value stiffness. This complex stiffness consists of a real stiffness and a hysteretic damping. We use it to explain the dynamic behaviors of the human connected to the exoskeleton, in particular the observed non-zero low frequency phase shift and the near constant damping ratio of the resonant as stiffness and inertia vary. We validate this concept by experimenting with an elbow-joint exoskeleton testbed on a subject while modifying joint stiffness behavior, exoskeleton inertia, and strength augmentation gains. We compare three different models of elbow-joint dynamic stiffness: a model with real stiffness, viscous damping and inertia, a model with complex stiffness and inertia, and a model combining the previous two models. Our results show that the hysteretic damping term improves modeling accuracy, using a statistical F-test. Moreover this improvement is statistically more significant than using classical viscous damping term. In addition, we experimentally observe a linear relationship between the hysteretic damping and the real part of the stiffness which allows us to simplify the complex stiffness model as a 1-parameter system. Ultimately, we design a fractional order controller to demonstrate how human hysteretic damping behavior can be exploited to improve strength amplification performance while maintaining stability.